

A control method for an open programming-free robot
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as inability to meet motion requirements, and achieve the effect of improving stability and rapidity, reducing operation difficulty, and saving labor and time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
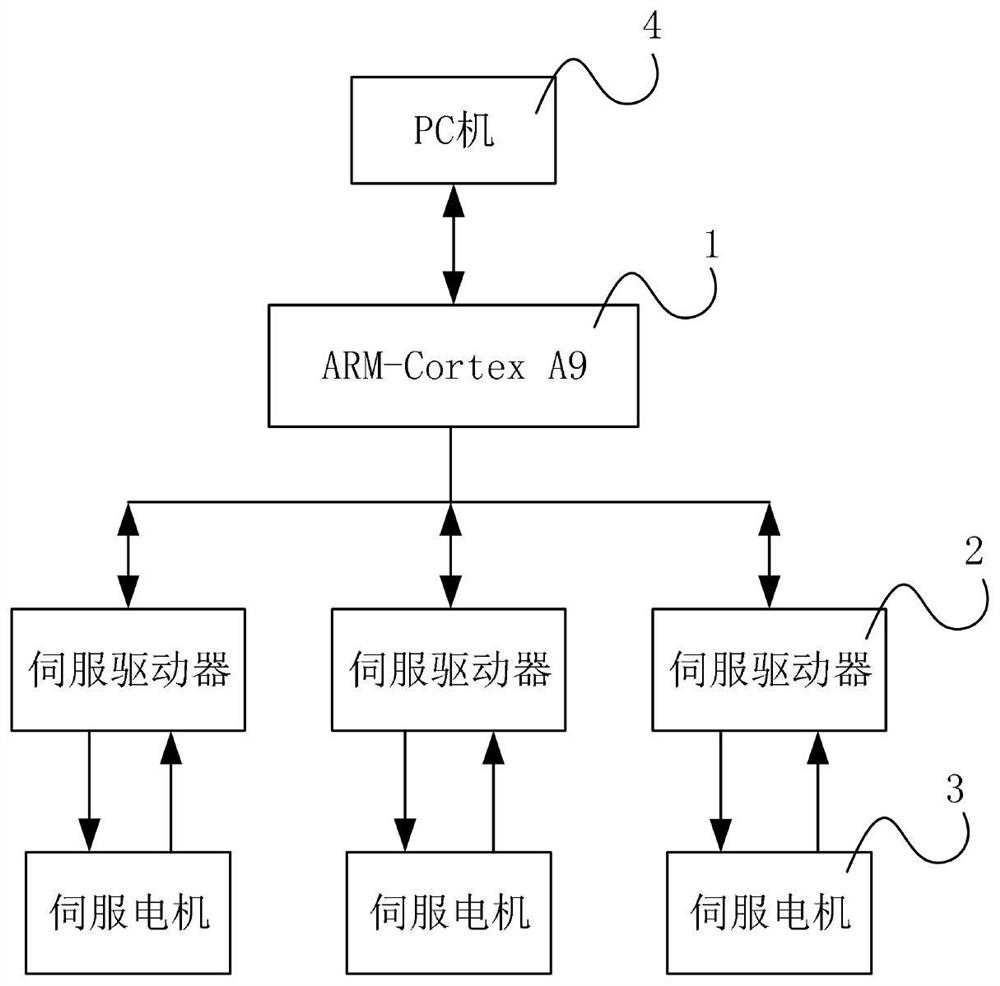
[0037] In this example, refer to figure 1 , an open programming-free robot control method is applied in an operating environment composed of a computer, a motion controller, and a robot, and its architecture includes a dual-core processor 1 based on the ARM-Cortex A9 architecture, a servo drive 2, and a servo motor 3 and PC 4. Among them, ARM-Cortex A9 1 serves as the master station of the entire control system and communicates with the servo driver 2 through ETherCAT. The servo drive 2 supplies power to the servo motor 3 and receives feedback signals from the encoder of the servo motor 3 . PC 4 and ARM-Cortex A9 1 realize data exchange through Ethernet.
[0038] The main frequency of ARM-Cortex A9 1 core is as high as 1GHZ. It is the control unit of the motion control system, responsible for receiving and sending data instructions from the host computer to perform complex kinematic calculations;
[0039] Servo driver 2 is responsible for receiving instructions from the mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More