

Discrete Sliding Mode Adaptive Control Method for Aircraft Based on Uncertainty Upper Bound Estimation
A sliding mode adaptive and uncertain technology, applied in the field of aircraft control, can solve problems such as poor practicability, and achieve the effect of facilitating engineering applications, improving adaptability and robustness, and improving estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0119] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
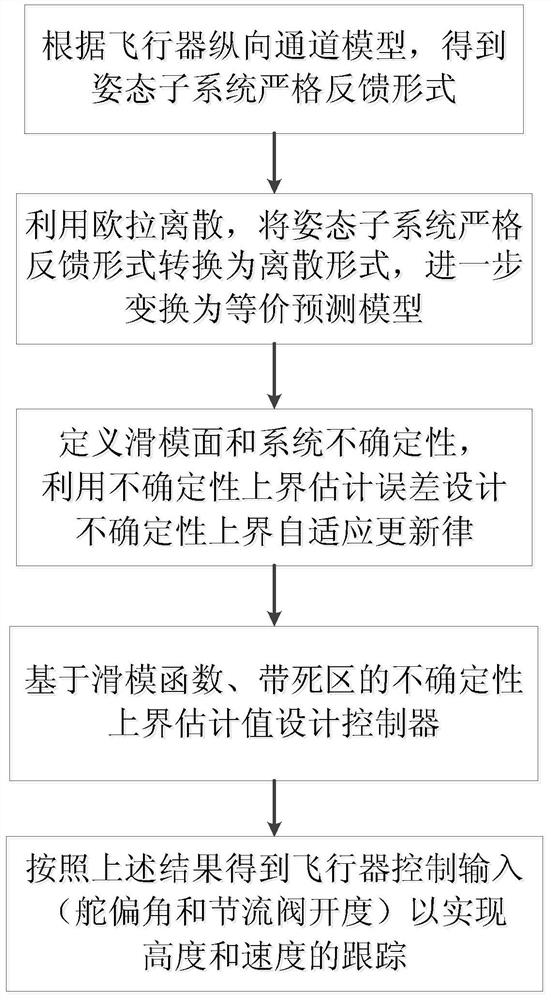
[0120] refer to figure 1 , the specific steps of the aircraft discrete sliding mode adaptive control method based on uncertainty upper bound estimation in the present invention are as follows:
[0121] Step 1: Consider the vehicle longitudinal channel dynamics model
[0122]
[0123]
[0124]
[0125]
[0126]
[0127] Among them, X s =[V,h,α,γ,q] T is the state variable, U c =[δ e ,β] T is the control input; V is the speed, γ is the track inclination, h is the altitude, α is the angle of attack, q is the pitch angle velocity, δ e Indicates the rudder deflection angle, β indicates the throttle valve opening; T, D, L and M yy represent thrust, drag, lift and pitching moment respectively; m, I yy , μ and r respectively represent the mass, the moment of inertia of the pitch axis, the gravitational coefficient and the distance from the center o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More