

Velocity ambiguity resolution angle measurement method for vehicle-mounted LFMCW radar
A technology for speed and angle measurement, applied in the field of signal processing, can solve the problems of reducing radar data rate and increasing signal processing time, and achieve the effect of reducing signal processing time and increasing radar data rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0027] Step 1: Assume two targets, target 1 is in the direction of 28 degrees in front of the right of the radar (the left side of the radar is negative, and the right side is positive), the distance is 80m, and the speed is 30m / s; target 2 is in the direction of 23 degrees in front of the left side of the radar , the distance is 60m, and the speed is 13m / s. Set the test indicators: the absolute error of the target distance is within 1m, the absolute error of the speed is within 0.1m / s, and the absolute error of the angle is within 1 degree.
[0028] Step 2: Set the left and right cutoff frequencies of the eight low-pass filters LPF to -255MHz and 255MHz respectively, and the passband to 502MHz. Set the sampling rate (for a single ramp) of the 8 ADCs to 25.1MHz.
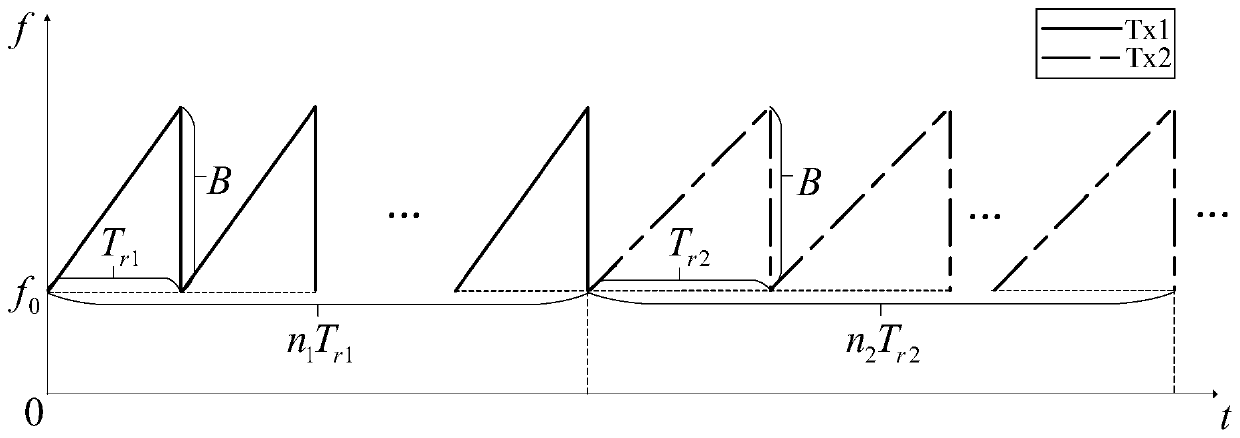
[0029] Step 3: Use the ramp generator to generate 2-channel linear FM continuous wave signals. Signal 1 T r1 is 40μs, bandwidth B is 500MHz, n 1 is 320; T of signal 2 r2 is 50μs, bandwidth B is 500MHz, n 2 for ...
Embodiment 2
[0033] Step 1: Assume two targets, target 1 is in the direction of 28 degrees in front of the right of the radar (the left side of the radar is negative, and the right side is positive), the distance is 80m, and the speed is 30m / s; target 2 is in the direction of 23 degrees in front of the left side of the radar , the distance is 60m, and the speed is 13m / s. Set the test indicators: the absolute error of the target distance is within 1m, the absolute error of the speed is within 0.1m / s, and the absolute error of the angle is within 1 degree.
[0034] Step 2: Set the left and right cutoff frequencies of the eight low-pass filters LPF to -205MHz and 205MHz respectively, and the passband to 402MHz. Set the sampling rate (for a single ramp) of the eight analog-to-digital converters ADC to 40MHz.
[0035] Step 3: Use the ramp generator to generate 2-channel linear FM continuous wave signals. Signal 1 T r1 20μs, bandwidth B is 400MHz, n 1 is 640; T of signal 2 r2 25μs, bandwidth ...
Embodiment 3
[0039] Step 1: Assume two targets, target 1 is in the direction of 28 degrees in front of the right of the radar (the left side of the radar is negative, and the right side is positive), the distance is 80m, and the speed is 30m / s; target 2 is in the direction of 23 degrees in front of the left side of the radar , the distance is 60m, and the speed is 13m / s. Set the test indicators: the absolute error of the target distance is within 1m, the absolute error of the speed is within 0.1m / s, and the absolute error of the angle is within 1 degree.
[0040] Step 2: Set the left and right cutoff frequencies of the eight low-pass filters LPF to -155MHz and 155MHz respectively, and the passband to 302MHz. Set the sampling rate (for a single ramp) of the 8 ADCs to 37.5MHz.
[0041] Step 3: Use the ramp generator to generate 2-channel linear FM continuous wave signals. Signal 1 T r1 16μs, bandwidth B is 300MHz, n 1 is 800; T of signal 2 r2 is 32μs, bandwidth B is 300MHz, n 2 for 400...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More