

Bionic robot fish motion control method, controller and bionic robot fish
A technology of motion control and robotic fish, applied in the field of bionic fish, can solve problems such as error-prone calculation results and complicated derivation process, and achieve the effect of improving autonomy and adaptability and realizing control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0027] Such as Figure 4 As shown, a kind of bionic robotic fish motion control method of the present embodiment comprises:
[0028] S101: Obtain the joint angle of the caudal fin of the fish and the corresponding motion state label of the bionic robotic fish, and store them in the data set; the motion state labels of the bionic robotic fish include straight-swimming motion state labels and turning motion state labels.
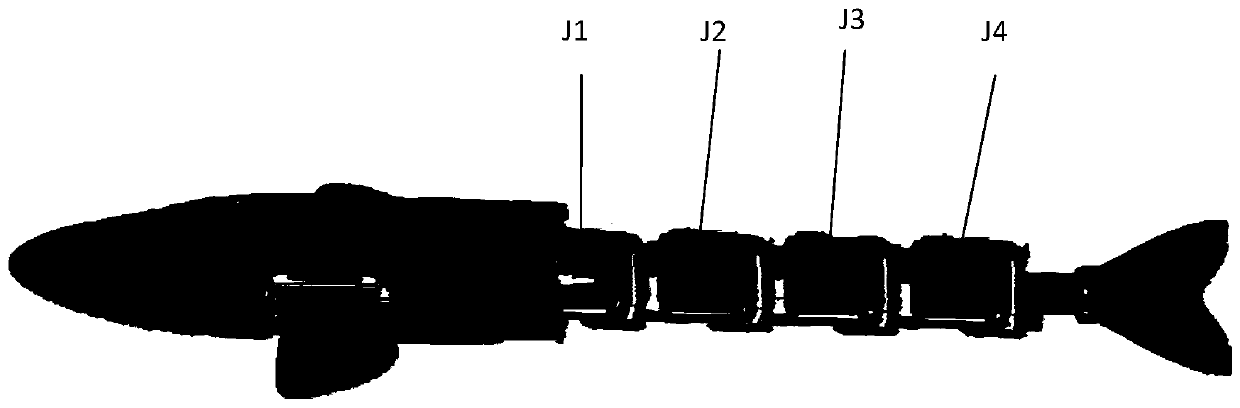
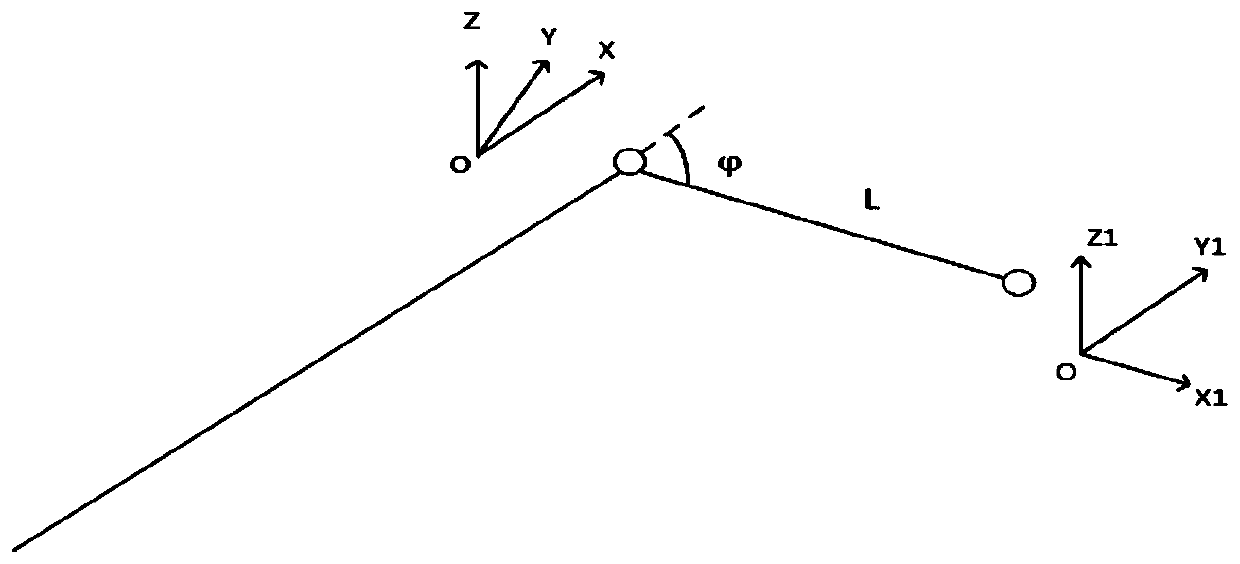
[0029] The structure diagram of the bionic robot fish is as follows: figure 1 As shown, the analysis joint J 4 Effects of changes in robotic fish multimodal locomotion. Secondly, the mathematical model of the tail fin swing of the bionic robot fish is established as follows: figure 2 shown. Assume that the centroid of each segment is on the X axis, and that the centroid of each segment coincides with the geometric center. At this time, from the coordinate system {X,Y,Z} to the coordinate system {X 1 ,Y 1 ,Z 1} transformation matrix A is shown in formu...
Embodiment 2
[0073] This embodiment provides a controller, which adopts the steps in the above-mentioned method for controlling the motion of the bionic robotic fish to control the motion state of the bionic robotic fish.
Embodiment 3
[0075] This embodiment provides a bionic robot fish, which includes the above-mentioned controller.
[0076] Those skilled in the art should understand that the embodiments of the present disclosure may be provided as methods, systems, or computer program products. Accordingly, the present disclosure may take the form of a hardware embodiment, a software embodiment, or an embodiment combining software and hardware aspects. Furthermore, the present disclosure may take the form of a computer program product embodied on one or more computer-usable storage media (including but not limited to disk storage, optical storage, etc.) having computer-usable program code embodied therein.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More