

Targeted particle implanting robot suitable for clinical human lithotomy positions
A lithotomy position and robot technology, applied in the field of medical devices, can solve problems such as poor motion response, large fluctuations in driving torque, and lower overall stiffness, so as to improve force information perception, reduce fluctuations in driving torque, and improve stability. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below.
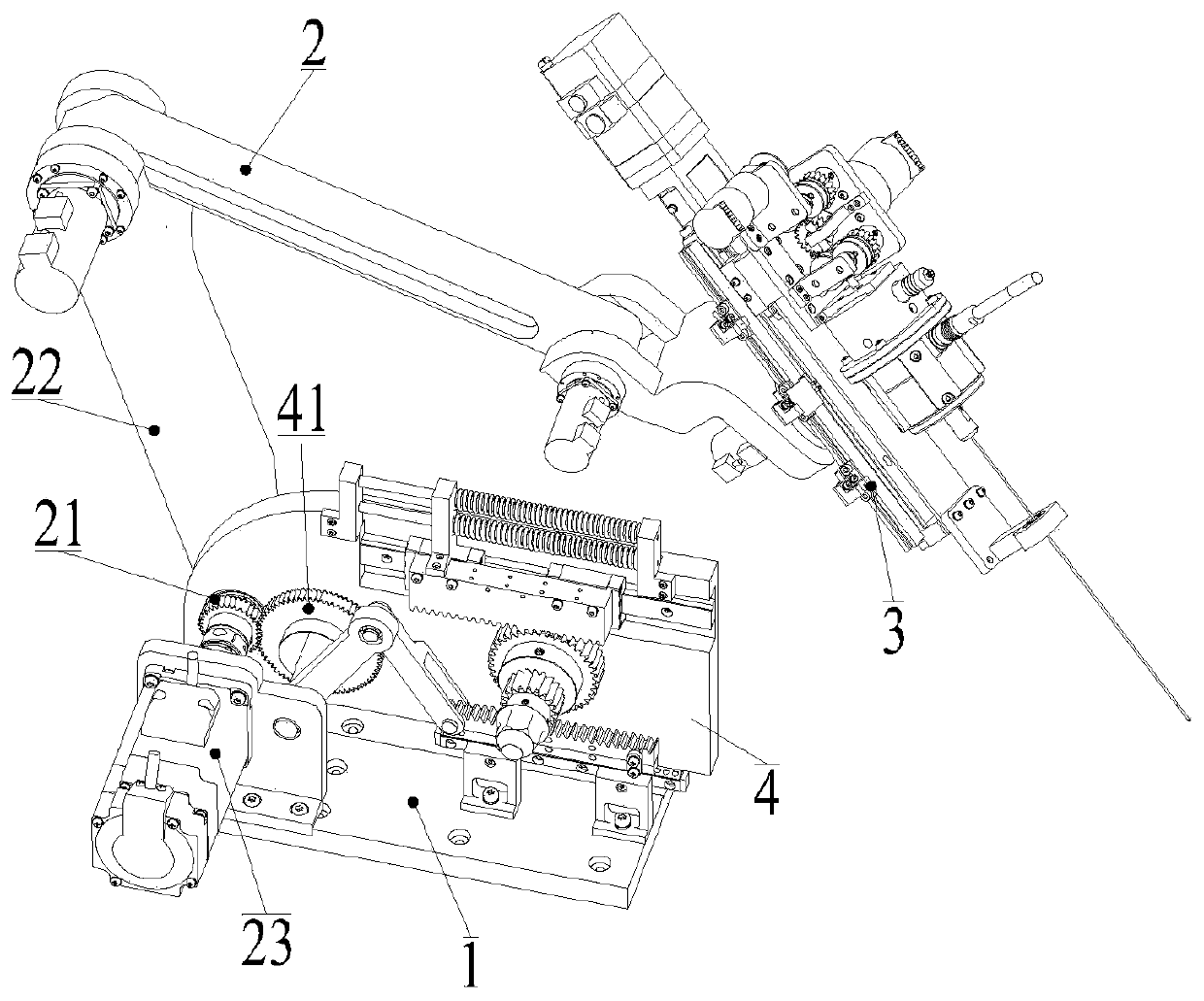
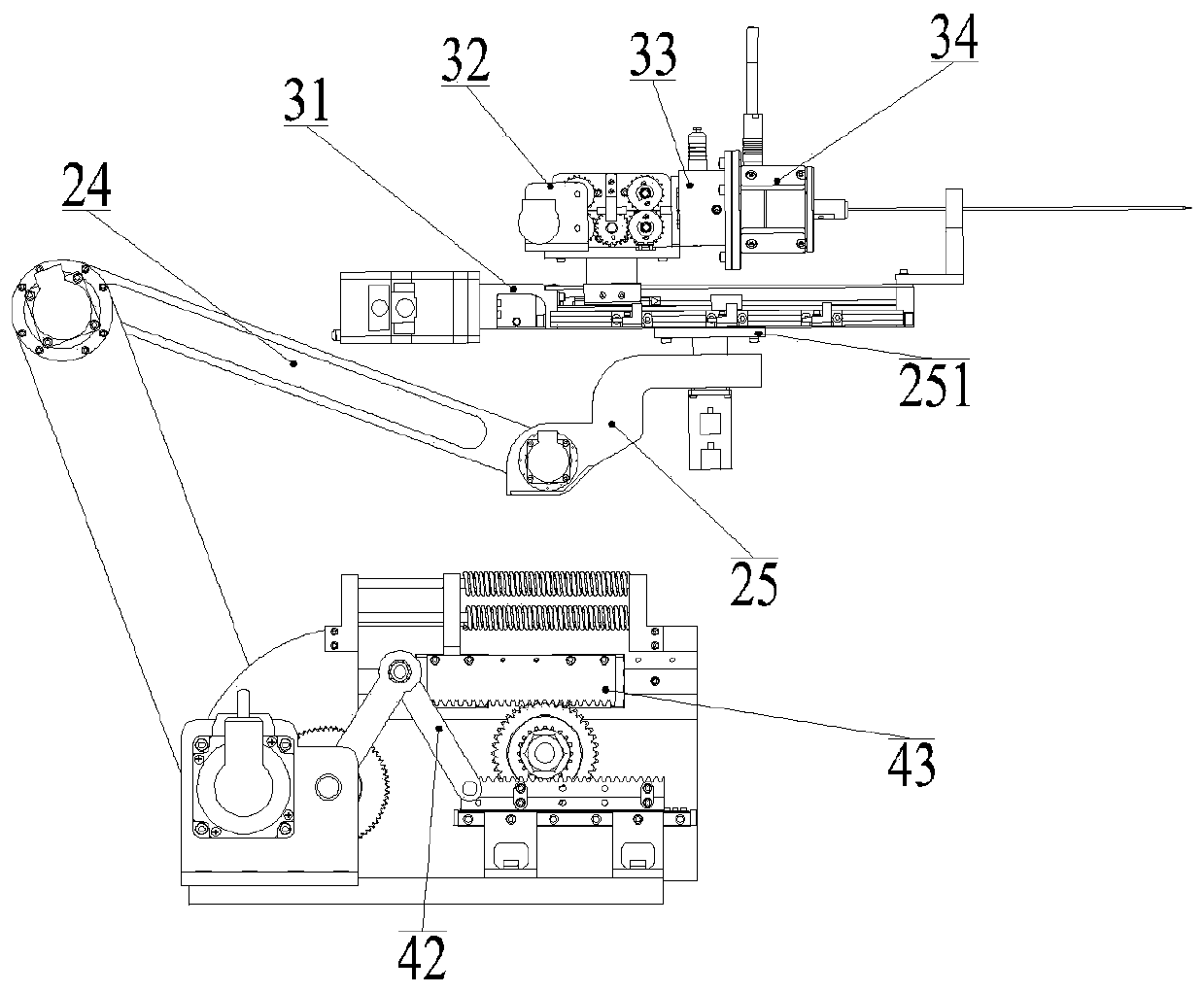
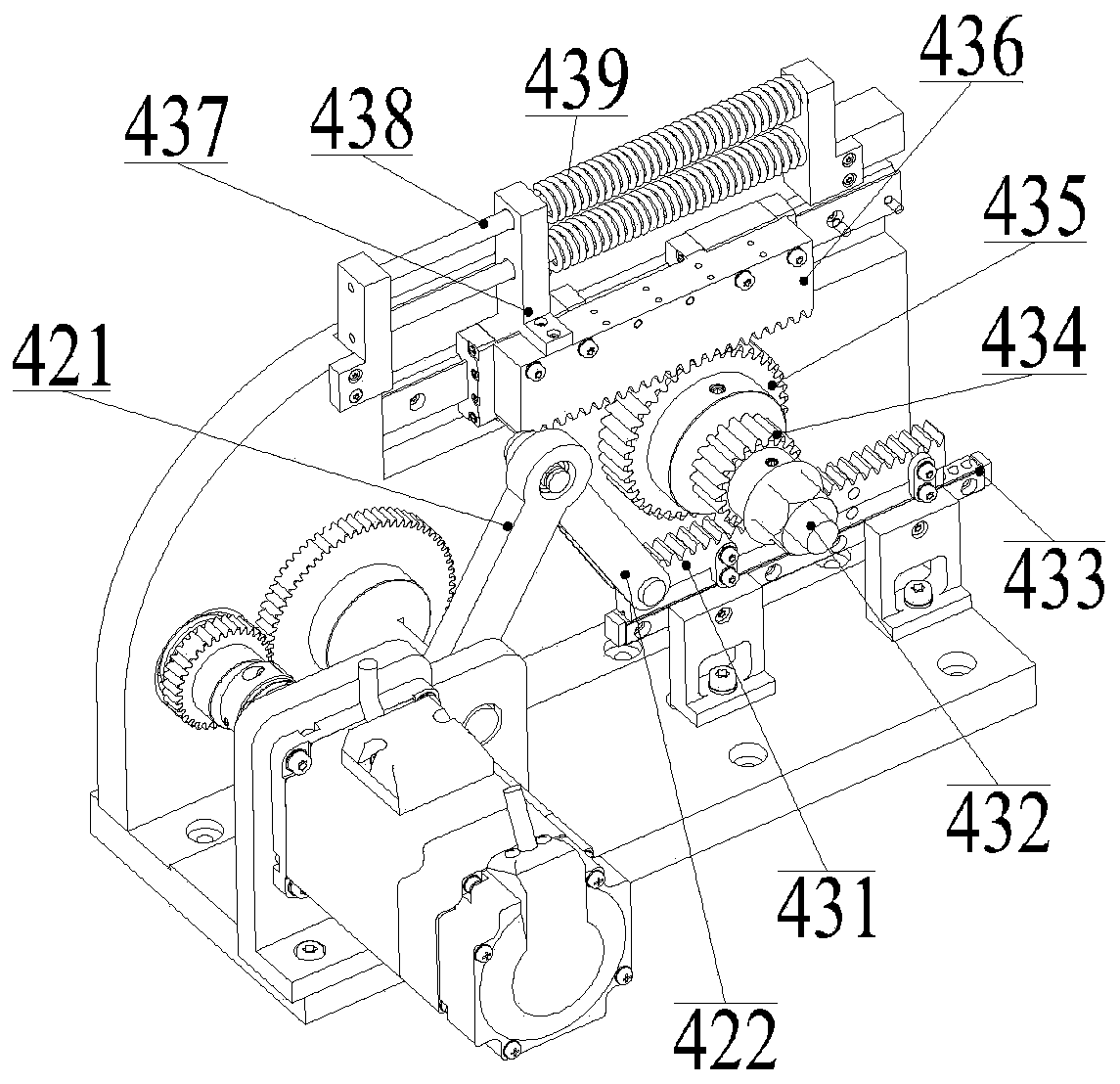
[0036] Such as Figure 1 to Figure 5 As shown, a targeted particle implantation robot suitable for clinical human lithotomy position includes a frame 1 and also includes:
[0037] The posture adjustment mechanism 2 is arranged on the frame 1, and is used to realize the transmission of movement and force under dynamic conditions;
[0038] The force-feedback friction wheel-type targeted particle implanter 3 is set on the posture adjustment mechanism 2, and is used to cooperate with the user to improve the force information perception ability during the implantation process of the targeted particle;
[0039] The sinusoidal elastic force amplification torque compensation mechanism 4 is arranged on the frame 1 and cooperates with the posture adjustment mechanism 2 to amplify the elastic for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More