

Control method of four-degree-of-freedom mechanical arm
A control method and technology of robotic arms, which are applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of poor real-time performance of manipulator control systems and increased difficulty in developing robot control systems, so as to achieve easier popularization and promotion, and various control modes. Realization and control with good real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] A control method for a four-degree-of-freedom mechanical arm, the specific implementation steps are as follows:
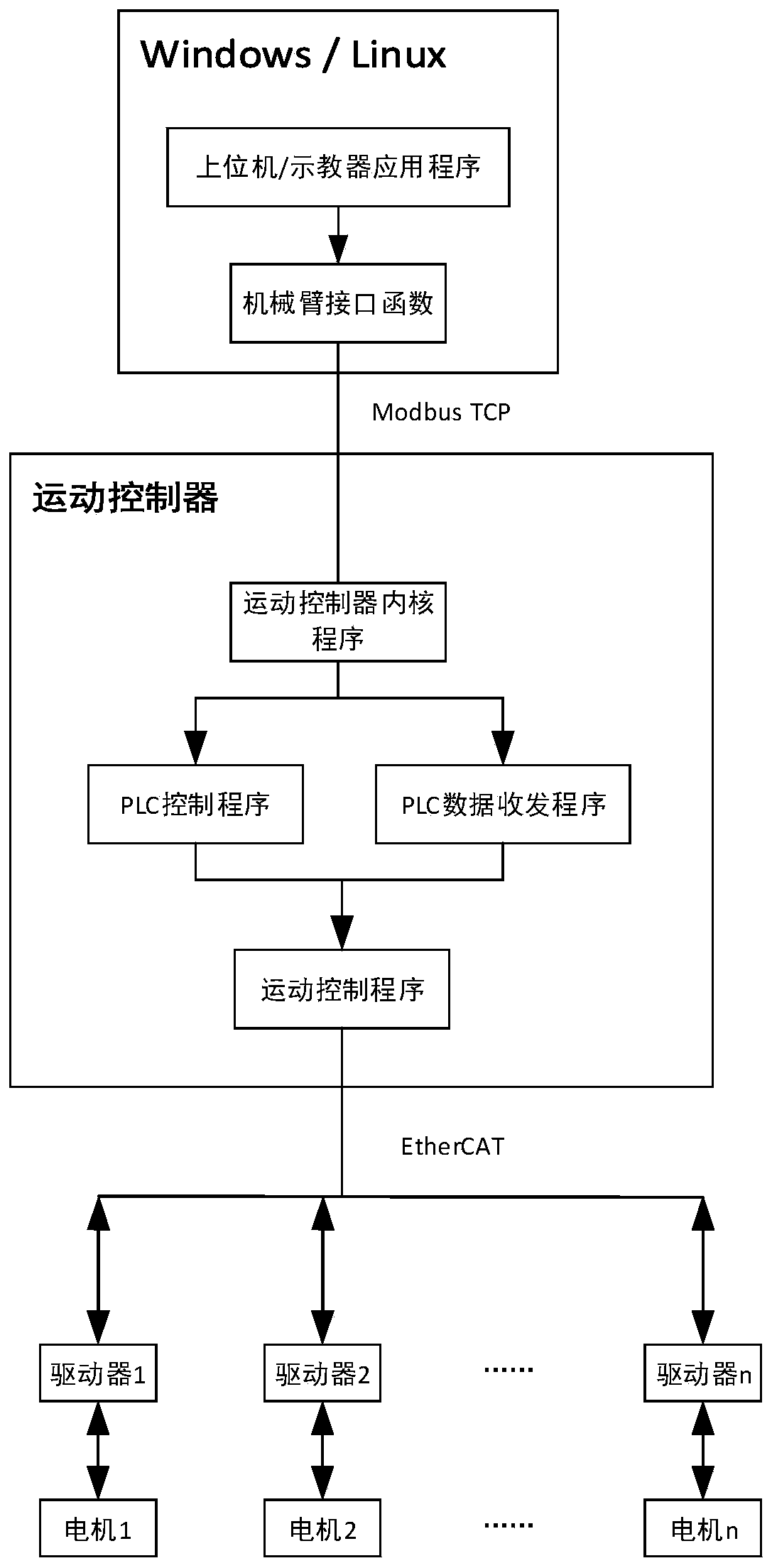
[0024] In the first step, the host computer sends the operation mode, pose information and motion commands to the motion controller according to a certain data format by calling the host computer interface program.
[0025] like figure 1 As shown, the host computer interface program is mainly responsible for the communication between the PC-motion controller, using the ModbusTCP / IP communication protocol to carry out data transmission between the two, using c++ to complete the realization of the interface program, the interface program can be used in Windows and Application under Linux system. When the host computer uses the mechanical arm, it only needs to call the c++ interface program to send the host computer control command to the motion controller. The communication between the motion controller and the upper computer is based on the principle that ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More