

Multi-group laser radar external parameter calibration system and method
A laser radar and calibration system technology, applied in the direction of radio wave measurement systems, instruments, etc., can solve the problems of sparse observation result information and the inability to detect the ground environment around the car body, etc., achieving low limitation, wide applicability, good The effect of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
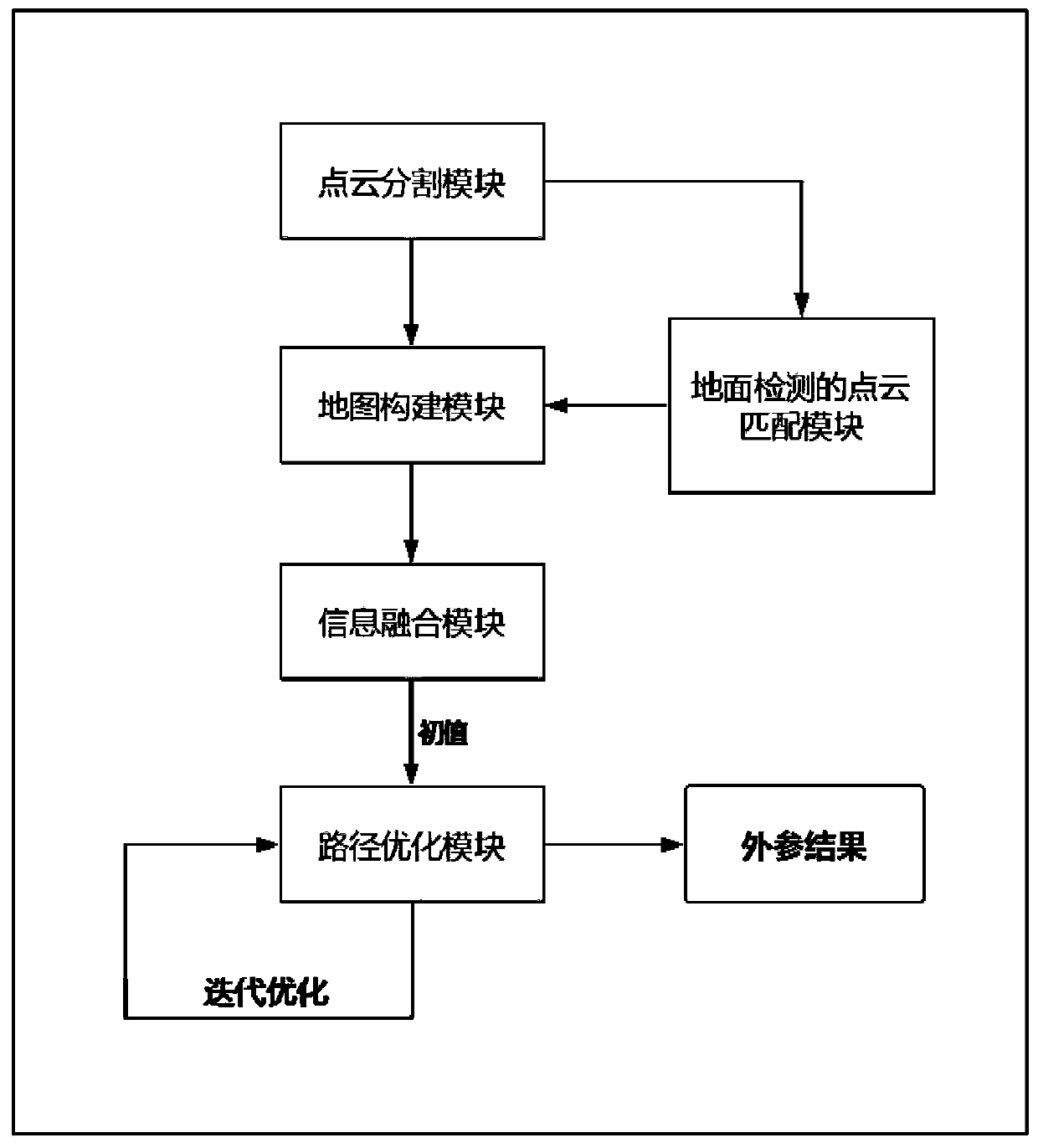
[0031] Such as figure 1 As shown, a multi-group lidar external parameter calibration system includes:
[0032] Point cloud segmentation module: the output of the laser radar is a three-dimensional laser point cloud, which contains the overall description of the external environment, including the road environment around the car body, obstacles, etc.; the point cloud segmentation module divides the three-dimensional laser point cloud into multiple categories , filter the noise points, and output the segmented semantic point cloud to the map building module and the ground detection point cloud matching module;
[0033] Point cloud matching module for ground detection: used to construct ground-based constraints, so that laser point cloud matching can be carried out on a relatively stable plane, point cloud matching uses semantic ICP (iterative closest point) The surrounding point cloud map registration strategy, the matching process uses the category information of the point clo...
Embodiment 2
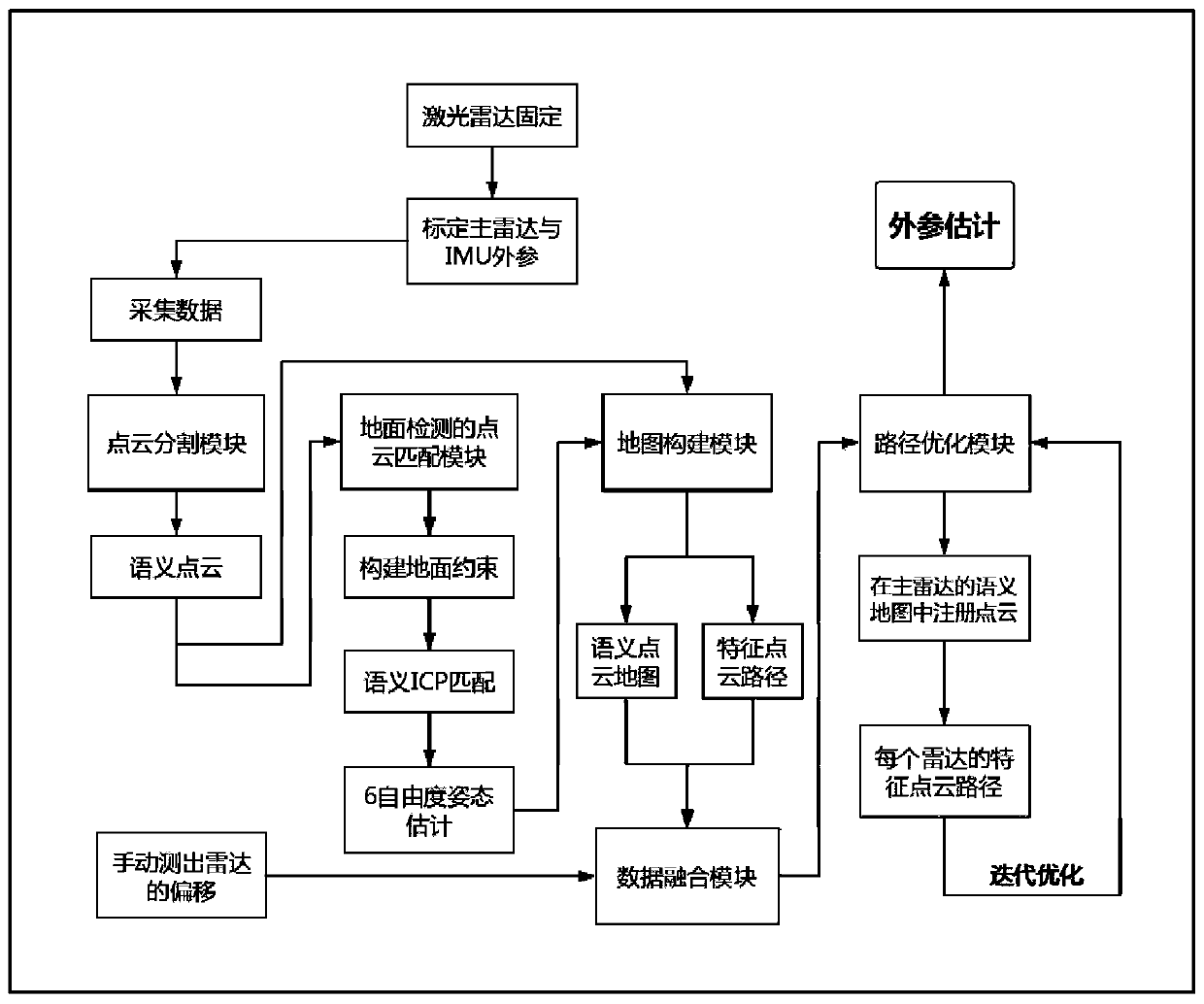
[0039] Such as figure 2 As shown, a multi-group laser radar external parameter calibration method specifically includes the following steps:
[0040] S1. The lidar is fixed on the car body, and the IMU is placed in the center of the car body. The positional relationship between multiple sets of lidars belongs to rigid body transformation. Select one of the lidars as the main radar, and set the others as auxiliary radars. Calibrate the main radar and IMU external reference;
[0041] S2. Select a suitable indoor and outdoor environment, and collect multiple sets of lidar and IMU data;
[0042] S3. Start the point cloud segmentation module offline, release the laser point cloud information to the point cloud matching module for ground detection, construct ground constraints and use the semantic ICP algorithm, and output the 6-degree-of-freedom attitude estimation of the registered point cloud;
[0043] S4. Obtain the 6-DOF attitude estimation of the semantic point cloud and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More