Robot shutdown charging pile structure
A technology of charging piles and robots, which is applied in the direction of current collectors, electric vehicles, electrical components, etc., can solve the problems of squeezing charging piles, short strokes of micro switches, and sparks, so as to reduce friction, improve safety, and reduce The effect of resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
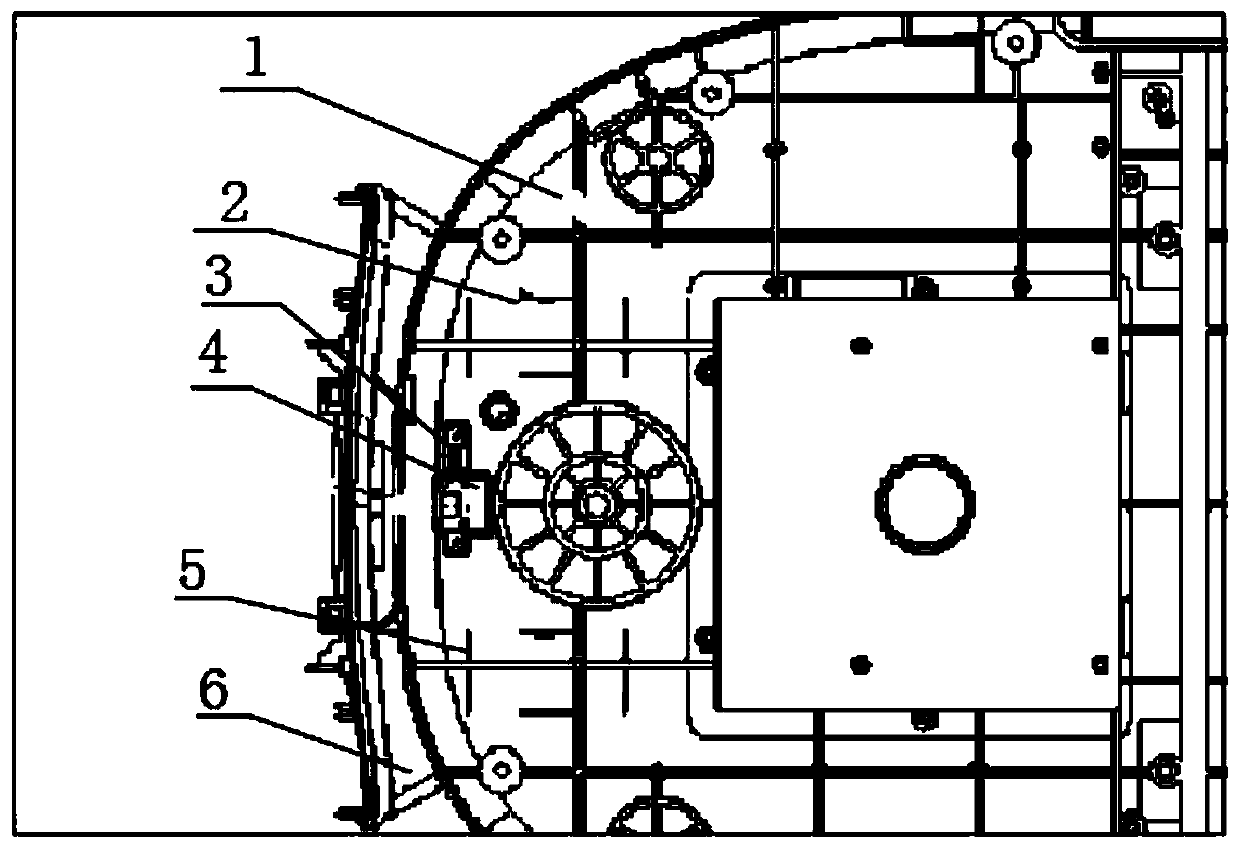
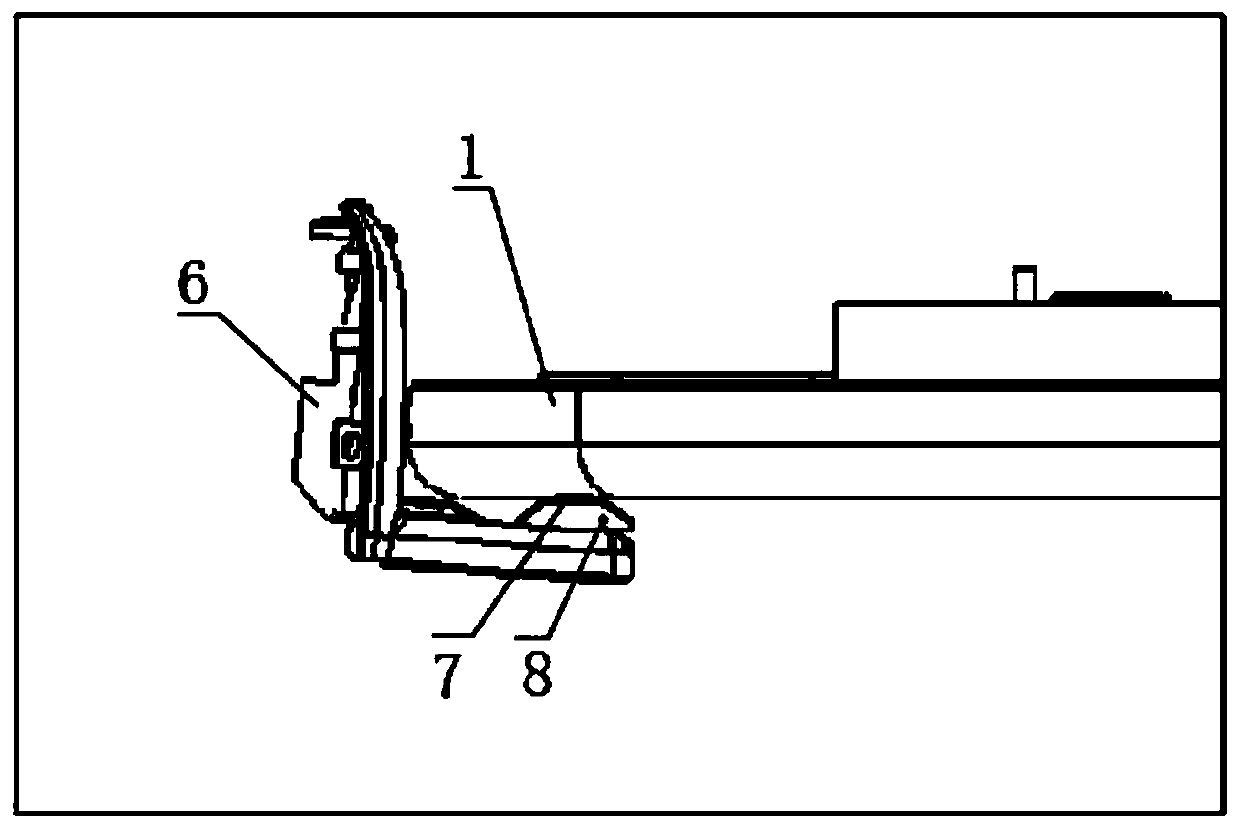
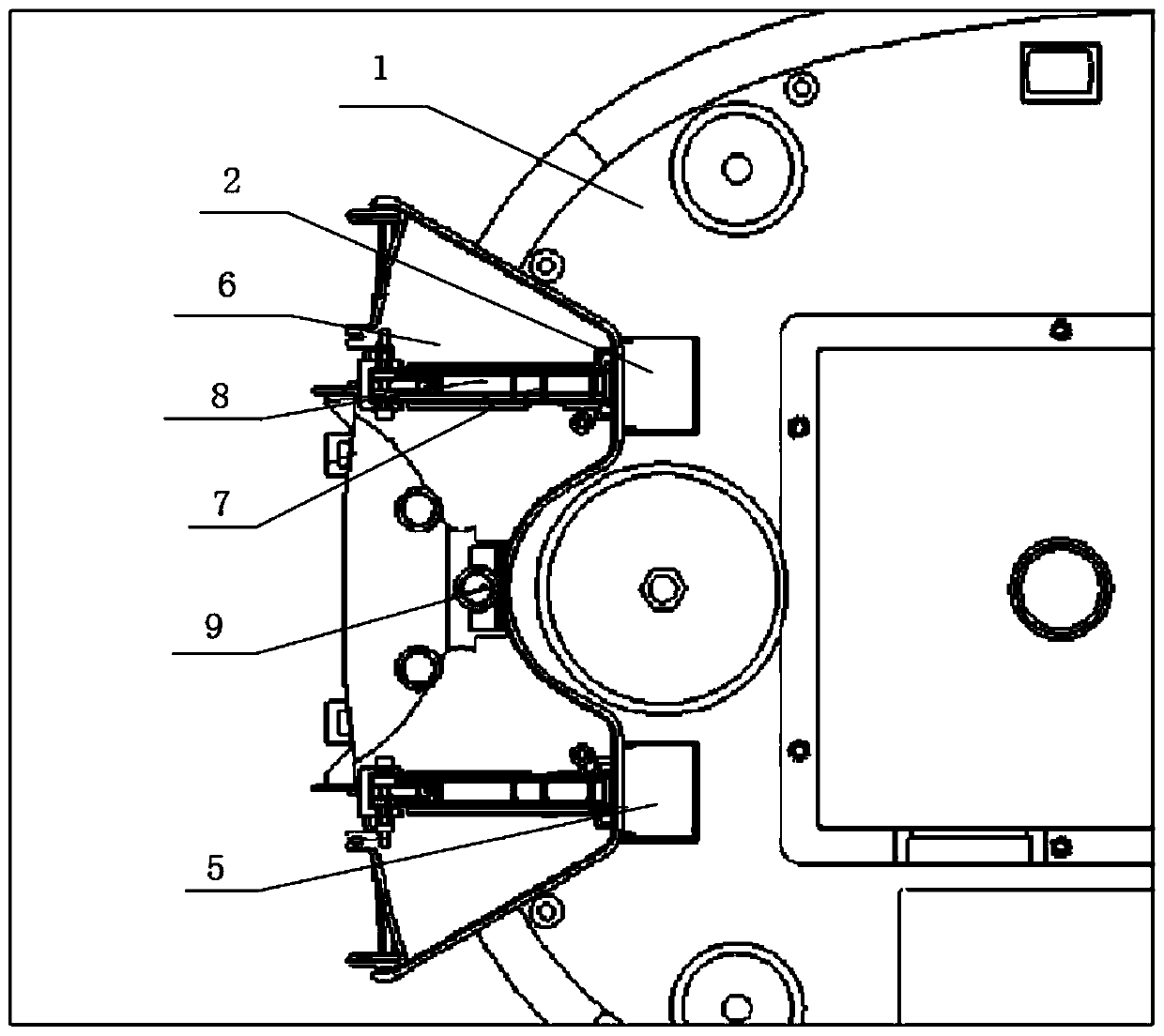
[0038] Such as Figure 1-5 As shown, a robot shutdown charging pile structure, including the robot 1, the charging pile 6 and the charging pile shrapnel 8:
[0039] A first chassis charging pole piece 2 and a second chassis charging pole piece 5 are installed at the tail end of the chassis of the robot 1, and a Hall sensor 4 is installed through a mounting bracket 3 at the middle position of the chassis tail of the robot 1;
[0040] The center of the front cover of the charging pile 6 is equipped with a magnet 9 for induction with the Hall sensor 4;
[0041] The charging pile shrapnel 8 is rotatably connected to the front bottom of the charging pile 6 through the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



