

Multi-sensor information fusion power transmission line robot navigation method and system
A power transmission line and multi-sensor technology, which is applied in the direction of radio wave measurement systems, instruments, and sound wave reradiation, can solve the problems of unsatisfactory autonomous operation of robots, large errors in GPS positioning accuracy, and incomplete information collection, etc., to achieve enhanced anti-corrosion Interference ability, fast convergence, effect of reducing irrelevant features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
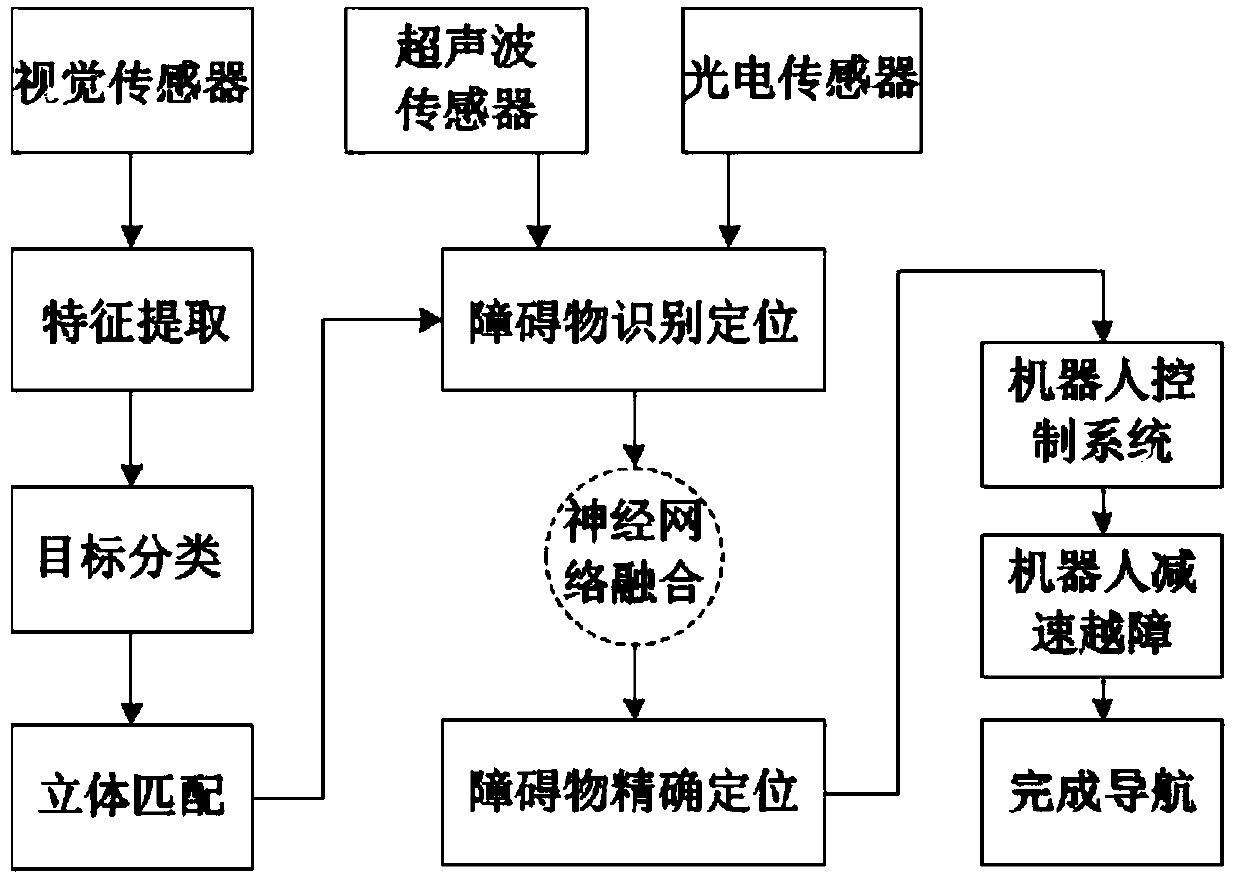
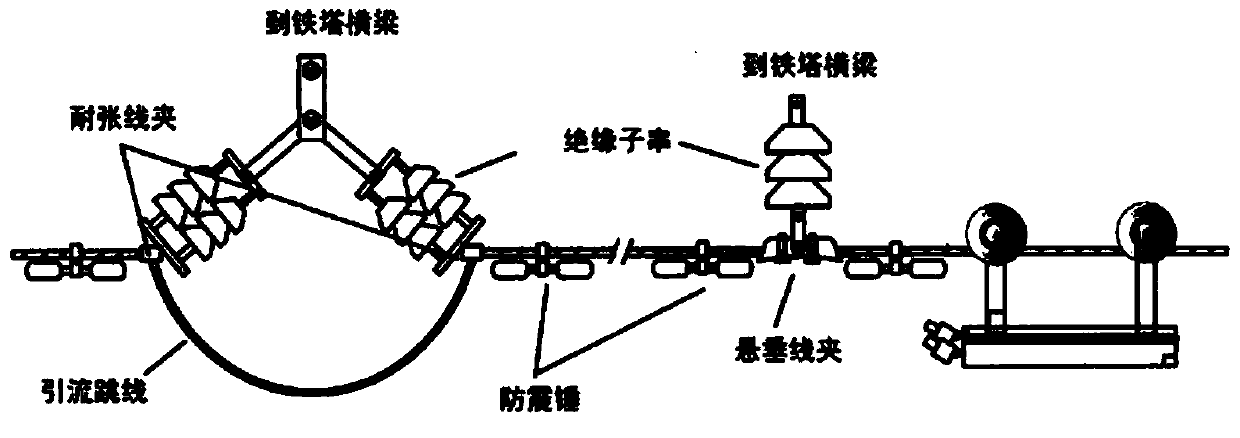
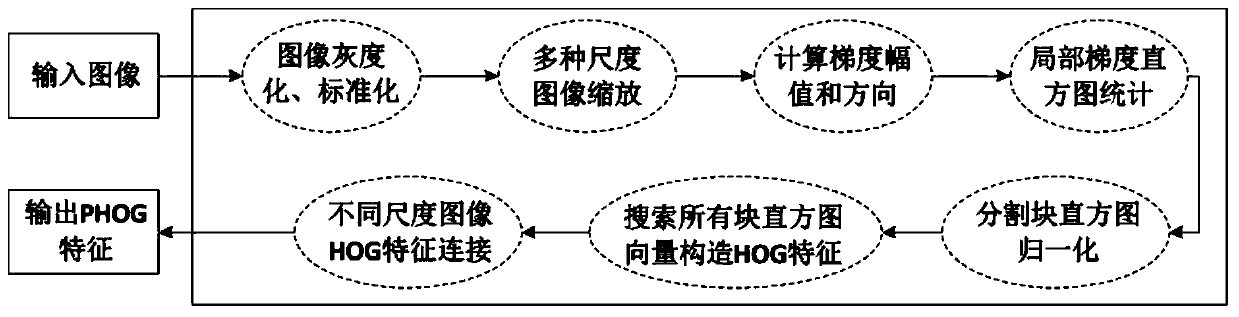
[0036] In one or more embodiments, a transmission line robot navigation method based on multi-sensor information fusion is disclosed, such as figure 1 As shown, the transmission line robot navigation system uses visual sensors, ultrasonic sensors, and photoelectric sensors. The image information collected by the visual sensor is extracted through the layered gradient direction histogram feature extraction method and the support vector machine classification algorithm. figure 2 Identify the obstacles on the walking path of the robot shown, and use the binocular vision system, one or more sets of ultrasonic sensors and one or more sets of photoelectric sensors to locate the obstacles at the same time, and obtain multiple sets of obstacle positioning information , and then use the neural network algorithm to fuse the obtained multiple sets of obstacle location information, and use the fused obstacle location results to guide the transmission line robot to overcome obstacles. The...
Embodiment 2
[0070] In one or more embodiments, a multi-sensor information fusion transmission line robot navigation system is disclosed, including:
[0071] A module for collecting the video image information of the power transmission line in the moving direction of the power transmission line robot through the visual sensor, and extracting the histogram feature of the layered gradient direction in the video image information;
[0072] The layered gradient orientation histogram feature used for extraction is input into the classification model trained by the support vector machine for classification, and the module for determining the obstacle type;
[0073] A module for simultaneously locating obstacles using a binocular vision system, one or more sets of ultrasonic sensors, and one or more sets of photoelectric sensors to obtain multiple sets of obstacle positioning information;
[0074] A module for merging the obtained multiple sets of obstacle positioning information through the neur...
Embodiment 3
[0078] In one or more implementations, it is disclosed that a terminal device includes a memory, a processor, and a computer program stored in the memory and operable on the processor. When the processor executes the program, the first embodiment is implemented. Multi-sensor information fusion method for robot navigation of transmission lines. For the sake of brevity, details are not repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More