

Method for identifying kinematic parameters of SCARA robot
A technology of robot kinematics and identification method, applied in the field of identification of SCARA robot kinematics parameters, can solve the problems of high requirements on users and operating environment, complicated operation, etc., and achieve the effect of low operating environment requirements and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
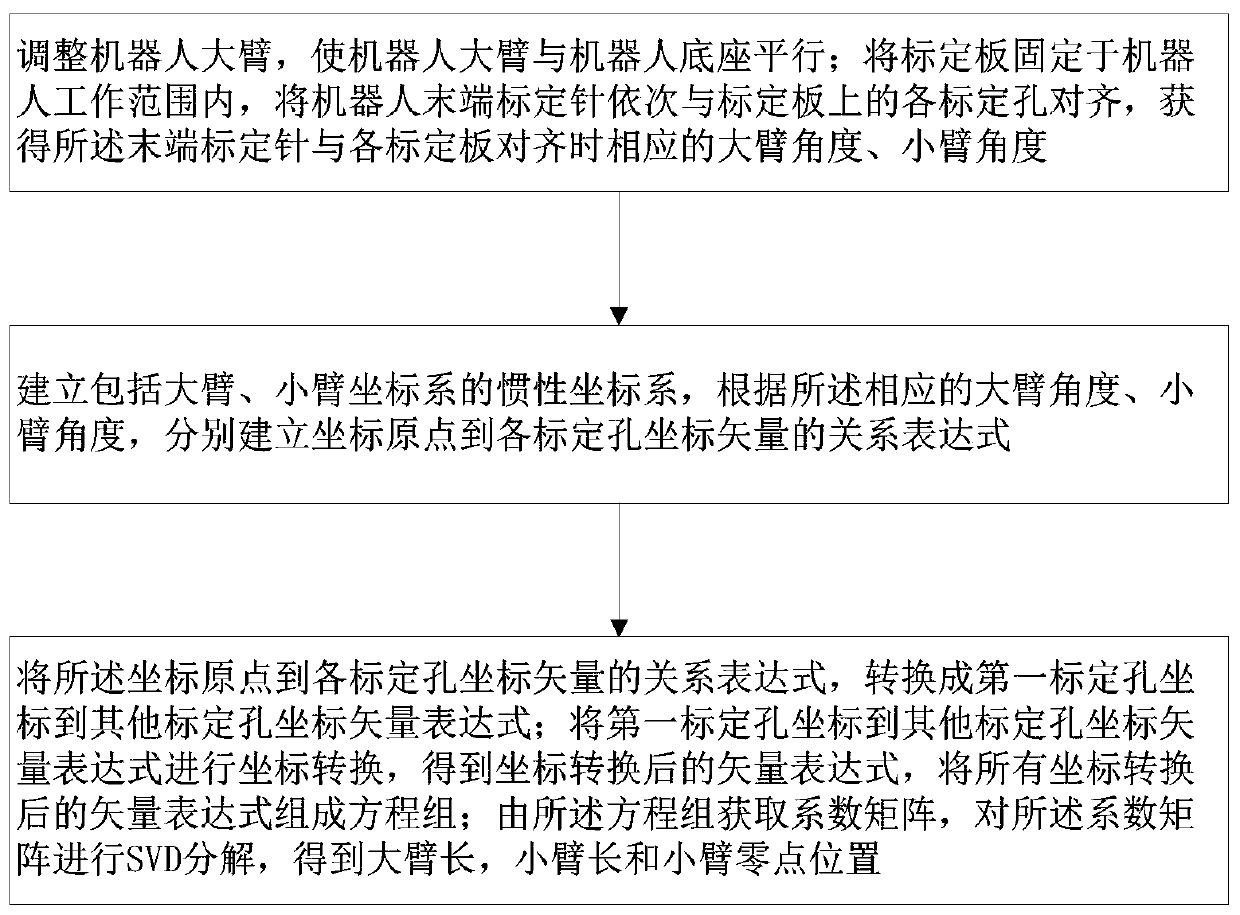
[0055] Embodiments of the present invention provide a method for identifying kinematic parameters of a SCARA robot, comprising the following steps:
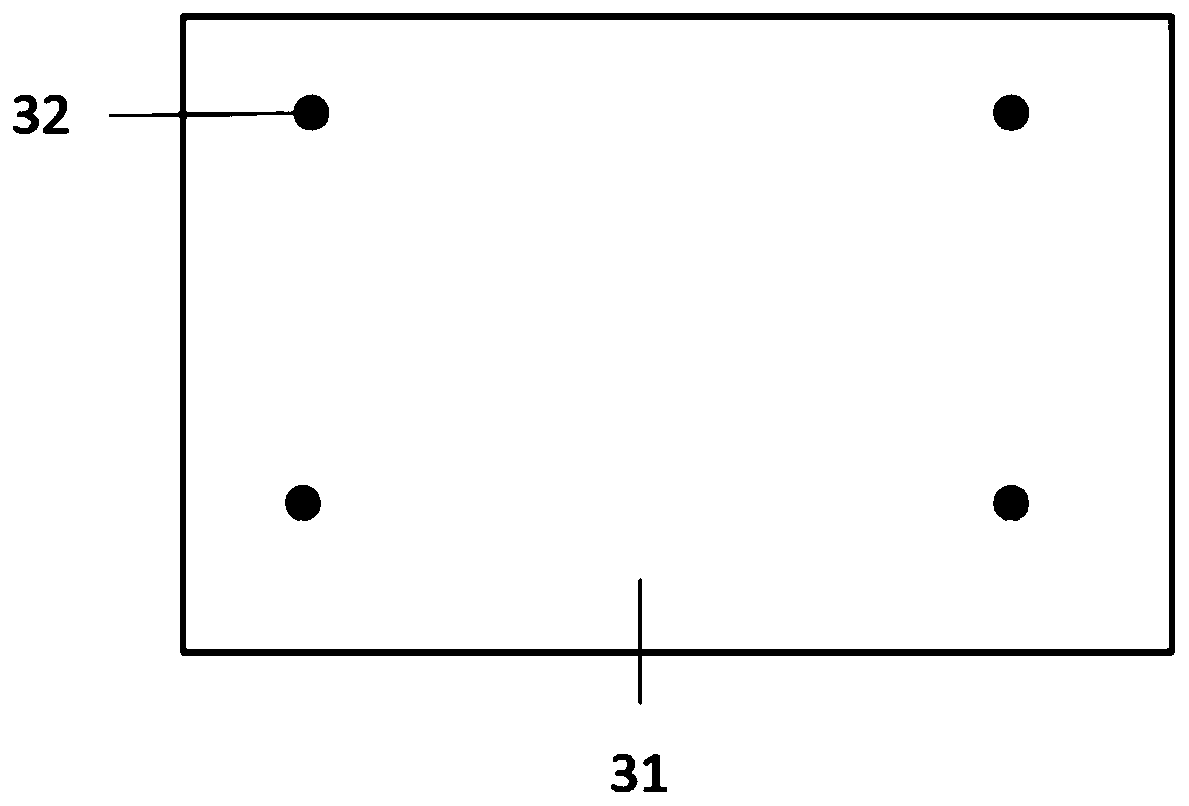
[0056] Adjust the arm of the robot so that the arm of the robot is parallel to the base of the robot; fix the calibration plate within the working range of the robot, align the calibration pins at the end of the robot with the calibration holes on the calibration plate in turn, and obtain the alignment between the calibration pins at the end and each calibration plate. Corresponding arm angle and forearm angle during alignment;
[0057] Establishing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More