

Implementation method from 3D sparse point cloud to 2D grid map based on VSLAM
An implementation method and sparse point technology, applied in image enhancement, image analysis, photo interpretation, etc., can solve the problems of positioning and navigation needs, high cost of laser radar, etc., and achieve the effect of improving operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0032] Table 1 is the system platform parameters. The hardware environment used for implementation is Jetson TX2. The present invention is carried out under the Linux system. The experimental means include data set testing and field testing. The field testing uses MYNTEYE for data collection, and completes different lighting conditions in different scenarios in the experimental corridors and rooftop balconies. performance evaluation.
[0033] parameter Implementation conditions System hardware platform Jetson TX2 vision sensor MYNTEYE S1030 operating environment Ubuntu 16.04 Programming language C++, Python test environment Laboratory Building (30*20m2)
[0034] Table 1
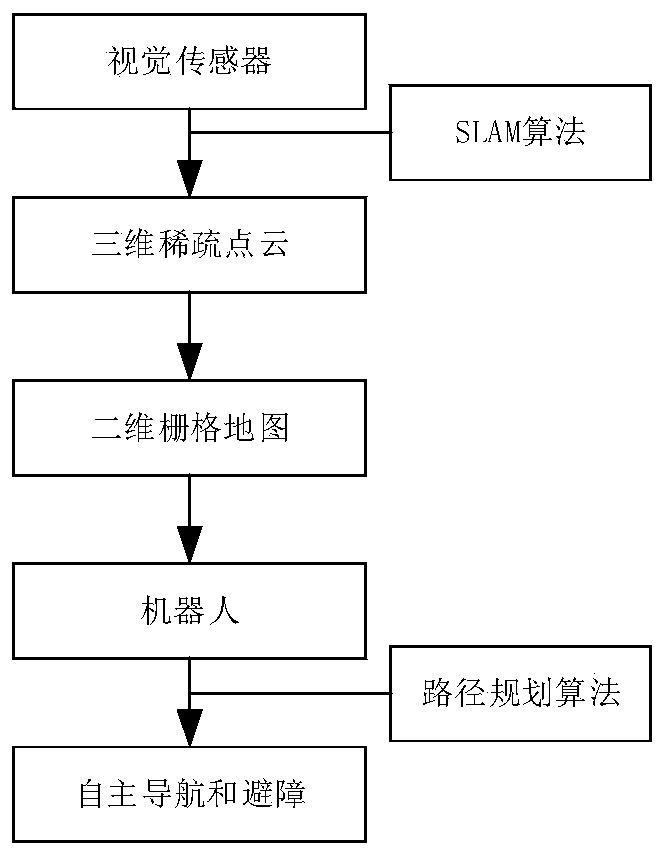
[0035] Such as figure 1 As shown, the implementation method of the present invention based on 3D sparse point cloud gener...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More