

Interactive lower limb rehabilitation training system
It is a rehabilitation training and interactive technology, which is applied in the direction of physical therapy and appliances to help people walk. It can solve problems such as poor buffer support, secondary injuries, and excessive leg exertion, so as to achieve strong support, prevent injuries, The effect of reducing the degree of exertion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
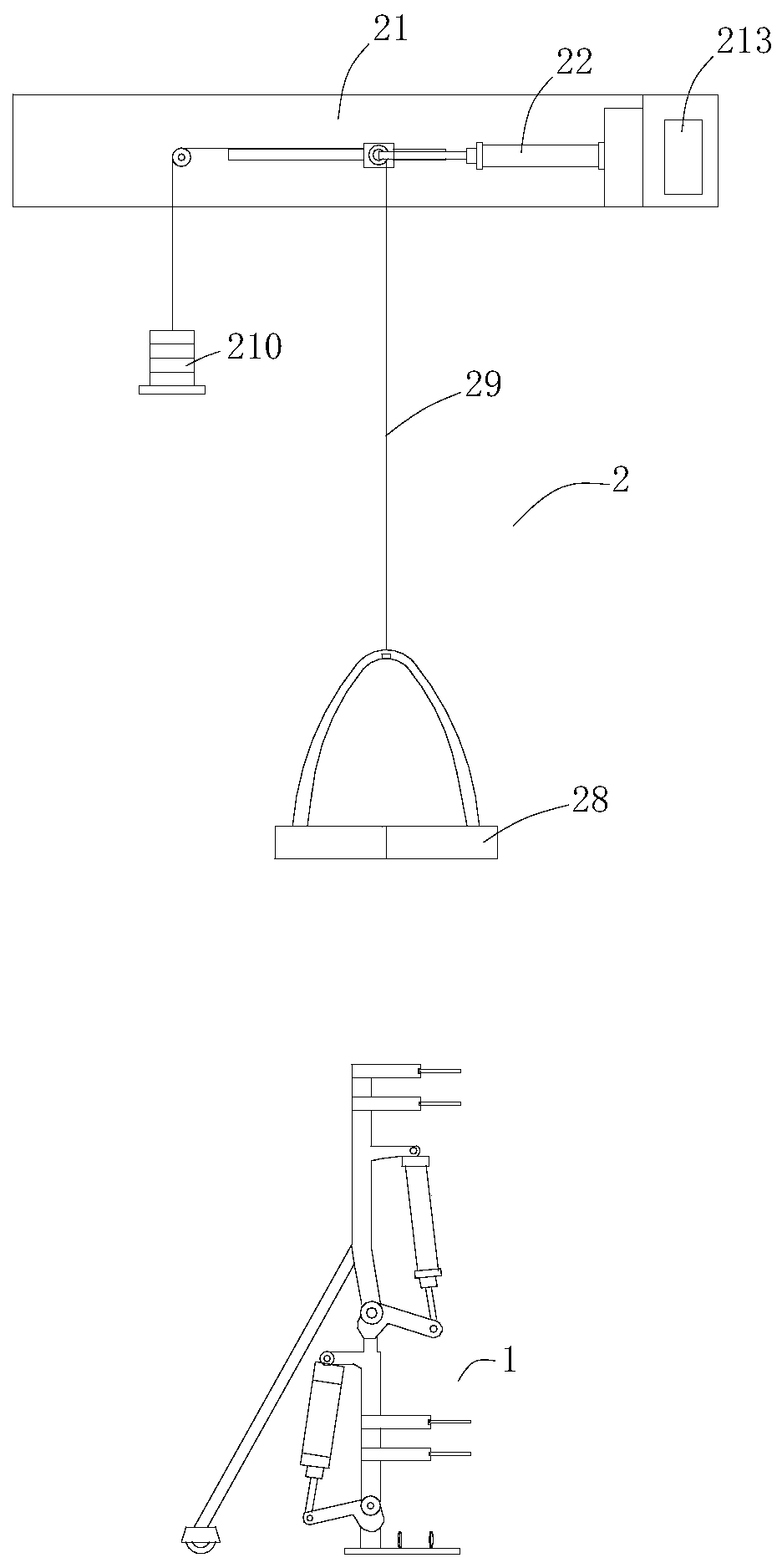
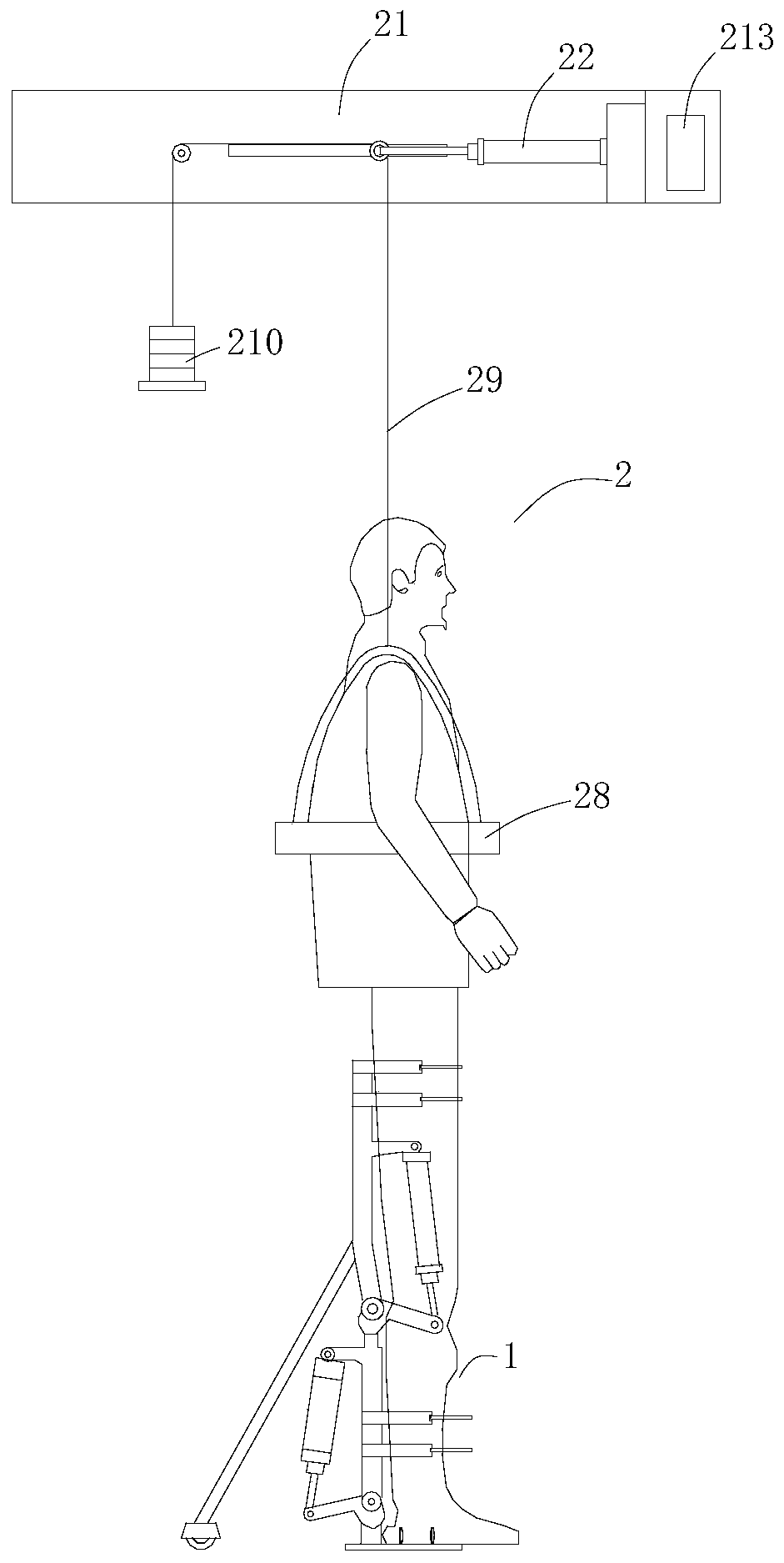
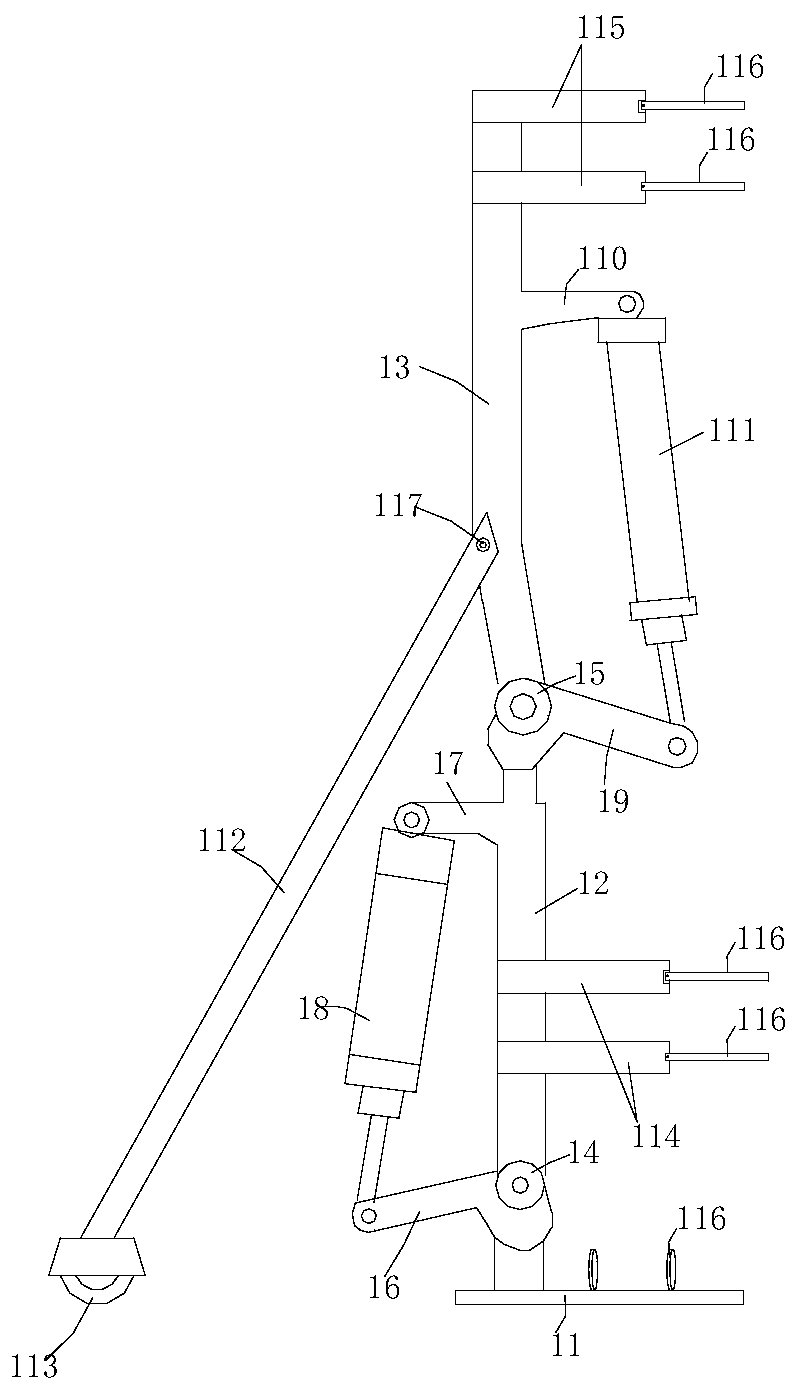
[0029] Such as Figure 1 to Figure 6 As shown, an interactive lower limb rehabilitation training system includes a wearable lower limb rehabilitation robot 1 and a weight loss traction mechanism 2 arranged above the wearable lower limb rehabilitation robot 1. The wearable lower limb rehabilitation robot 1 includes a foot plate 11, and a foot plate 11 hinged calf rod 12, thigh rod 13 hinged with calf rod 12, the hinged part of sole plate 11 and calf rod 12 forms machine ankle joint 14, and the hinged part of calf rod 12 and thigh rod 13 forms machine knee joint 15;
[0030] The end of sole plate 11 is fixedly connected with the first support plate 16, and the calf bar 12 is fixedly connected with the second support plate 17. An ankle cushioning part 18 is installed between the first support plate 16 and the second support plate 17, and the two ankle cushioning parts 18 The ends are respectively hinged with the first support plate 16 and the second support plate 17;
[0031] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More