

Manipulator capable of parallel clamping
A manipulator and mechanical technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems affecting the stability of motion and the accuracy of gripping, complex manipulator structure design, complex supporting facilities, etc., to achieve stable gripping, Small footprint and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on The embodiments of the present invention and all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
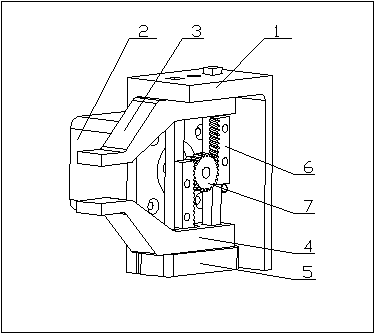
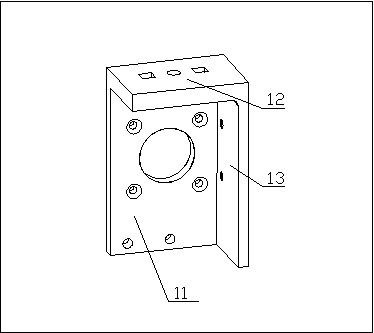
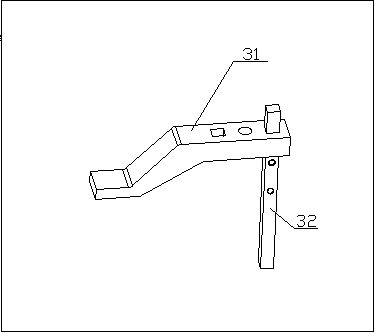
[0016] see Figure 1 to Figure 5, the present invention provides a technical solution: a manipulator for parallel clamping, including a manipulator holder 1, a motor 2, a manipulator upper jaw 3, a manipulator lower jaw 4, a manipulator limit block 5, a rack 6, and a gear 7. The manipulator holder 1 is composed of the rear surface 11 of the manipulator holder, the upper surface 12 of the manipulator holder, and the right surface 13 of the manipu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More