

Autonomous optical navigation feature comprehensive optimization method for landing of extraterrestrial celestial body
An optical navigation and optimization method technology, applied in the field of deep space exploration, can solve the problems of initial deviation correction, inertial measurement unit random drift, difficulty in meeting high-precision navigation, etc., and achieve the effect of improving accuracy and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
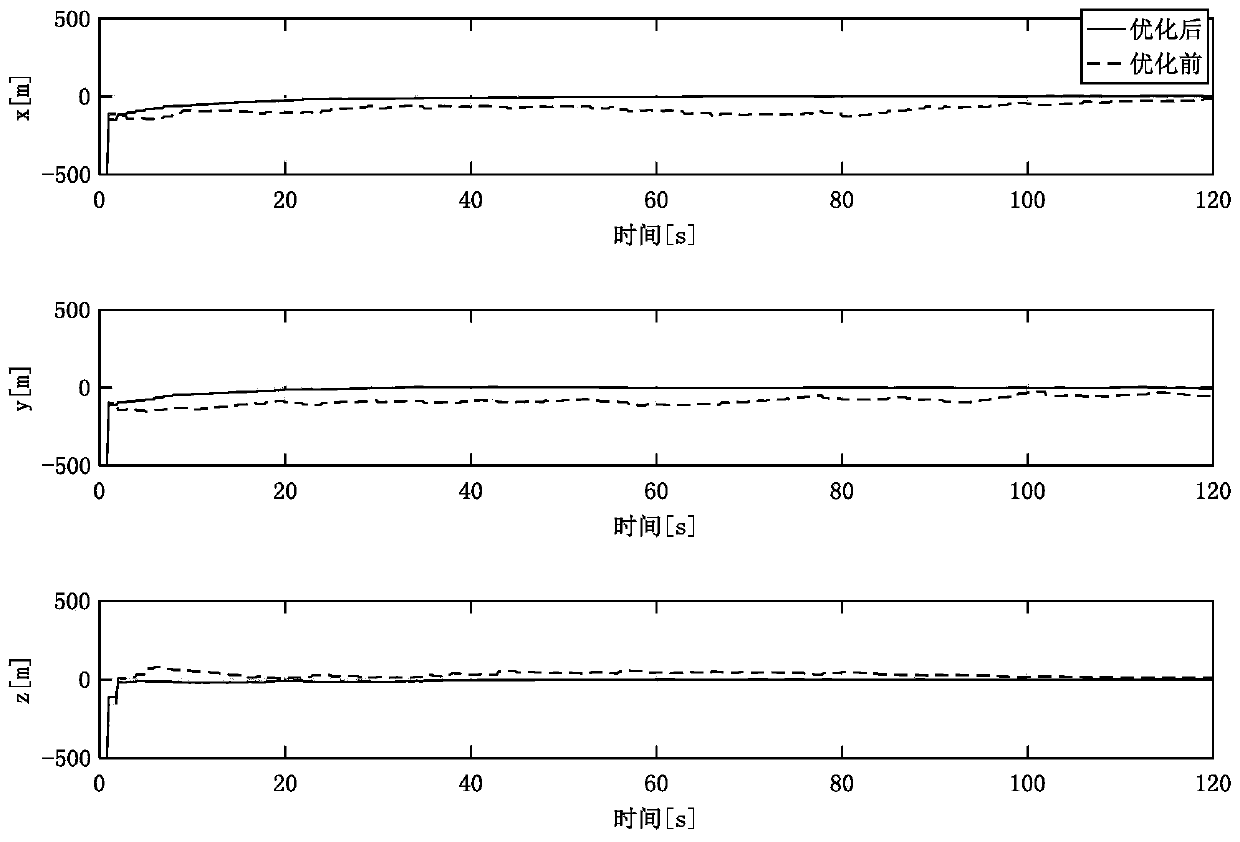
Embodiment 1
[0098] Under the Matlab environment, taking the Mars landing detection as the background, the mathematical simulation verification is carried out by using 10 characteristic points. It is assumed that the simulation ends when the lander reaches 100m above the landing point, and the landing time is 120s. The field of view of the navigation camera is 45°, the focal length is 14.6mm, and the measurement noise is 1 pixel. The IMU uses LN-200 with a sampling frequency of 50HZ.
[0099] The specific implementation method of this example is as follows:
[0100] The method for comprehensively optimizing the characteristics of autonomous optical navigation for extraterrestrial celestial body landing, the specific steps are as follows:
[0101] 1. A comprehensive optimization method for autonomous optical navigation features of extraterrestrial celestial body landing, including the following steps:
[0102] Step 1: Establish an autonomous visual navigation observation model based on f...
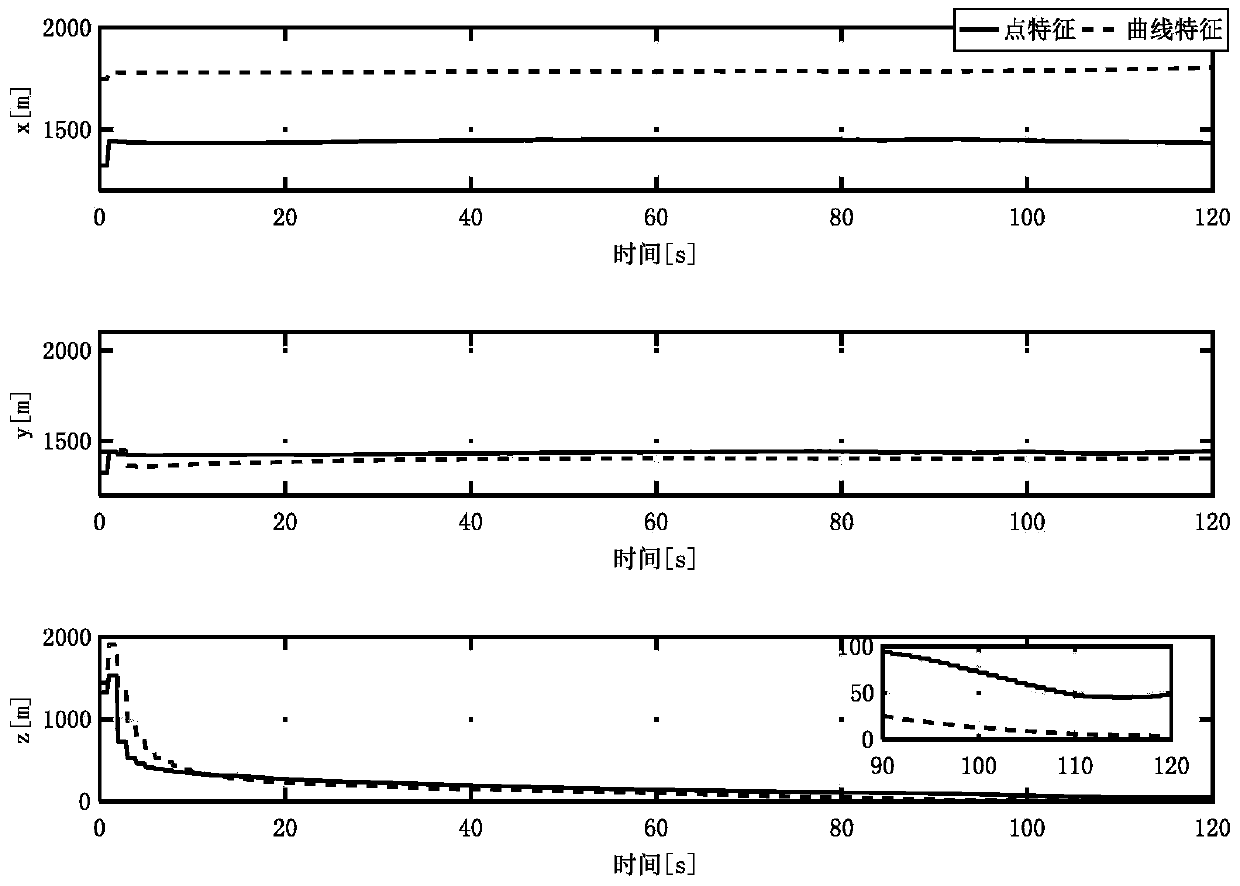
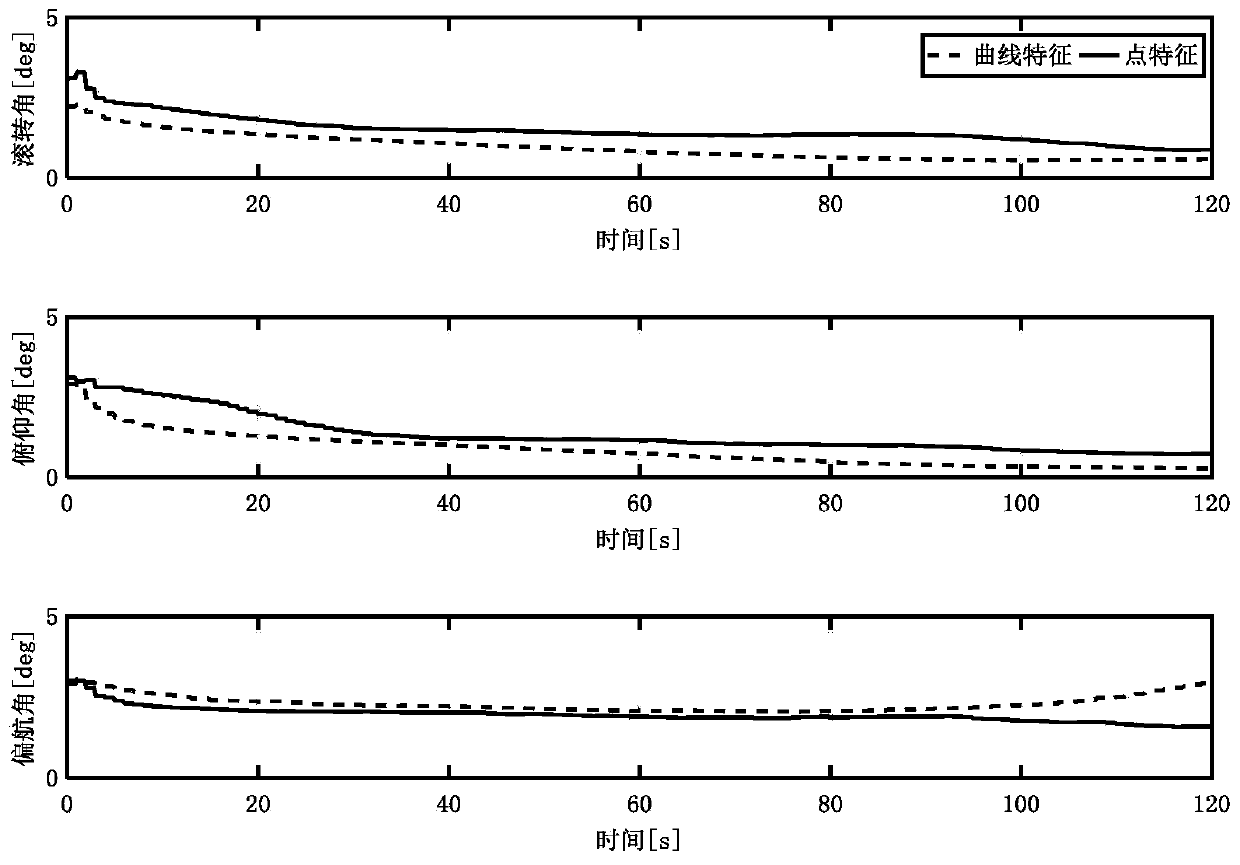
Embodiment 2
[0141] Under the Matlab environment, the mathematical simulation verification is carried out by using a curve and 10 characteristic points under the background of Mars landing detection. The landing environment is unknown, that is, the absolute position information of the navigation feature is unknown. It is assumed that the simulation ends when the lander reaches 100m above the landing point, and the landing time is 120s. The field of view of the navigation camera is 45°, the focal length is 14.6mm, and the measurement noise is 1 pixel. The IMU uses LN-200 with a sampling frequency of 50HZ.
[0142] The comprehensive optimization method for autonomous optical navigation features of extraterrestrial celestial body landing includes the following steps:
[0143] Step 1: Establish an autonomous visual navigation observation model based on feature points.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More