

Multi-floor positioning method and system
A positioning method and multi-floor technology, applied in the field of signal processing, can solve the problem of low collection efficiency of WIFI data sources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
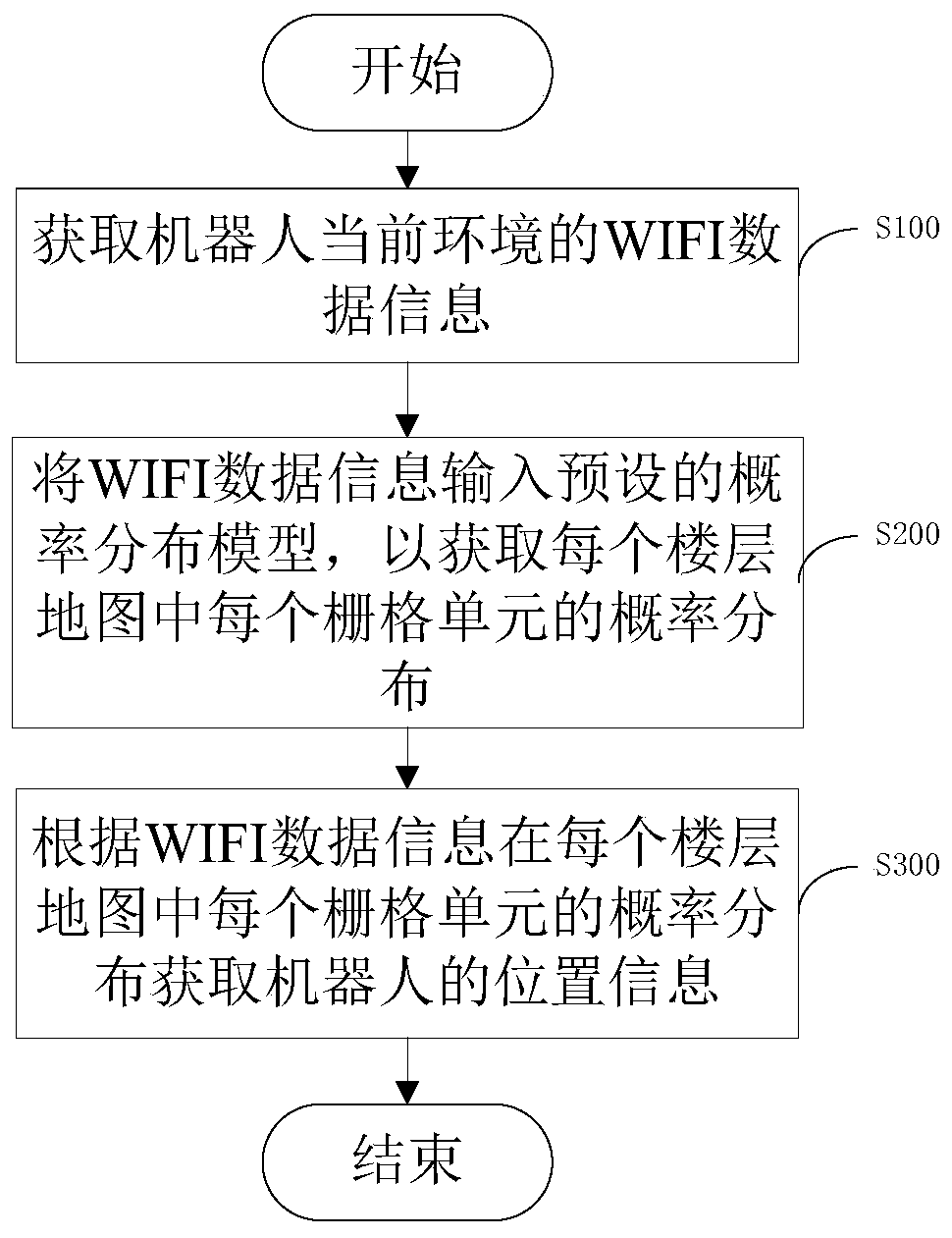
[0063] Please see figure 1 , figure 1 It is a flow chart of a multi-floor positioning method provided by the embodiment of the present application.
[0064] This method is applied to the robot, and the position of the robot is located by judging the probability of the WIFI signal strength obtained by the robot in each grid cell. The method specifically may include the following steps:
[0065] Step S100: Obtain the WIFI data information of the robot's current environment;
[0066] For example, the robot may capture WIFI data information in the environment by using data packets in the 802.11 protocol format in the wireless local area network, and the WIFI data information includes a MAC address and a corresponding signal strength RSS. Depending on the location of the robot, the obtained signal strength will also vary. Based on the WIFI data information of the current environment captured by the robot, the location of the robot can be determined.
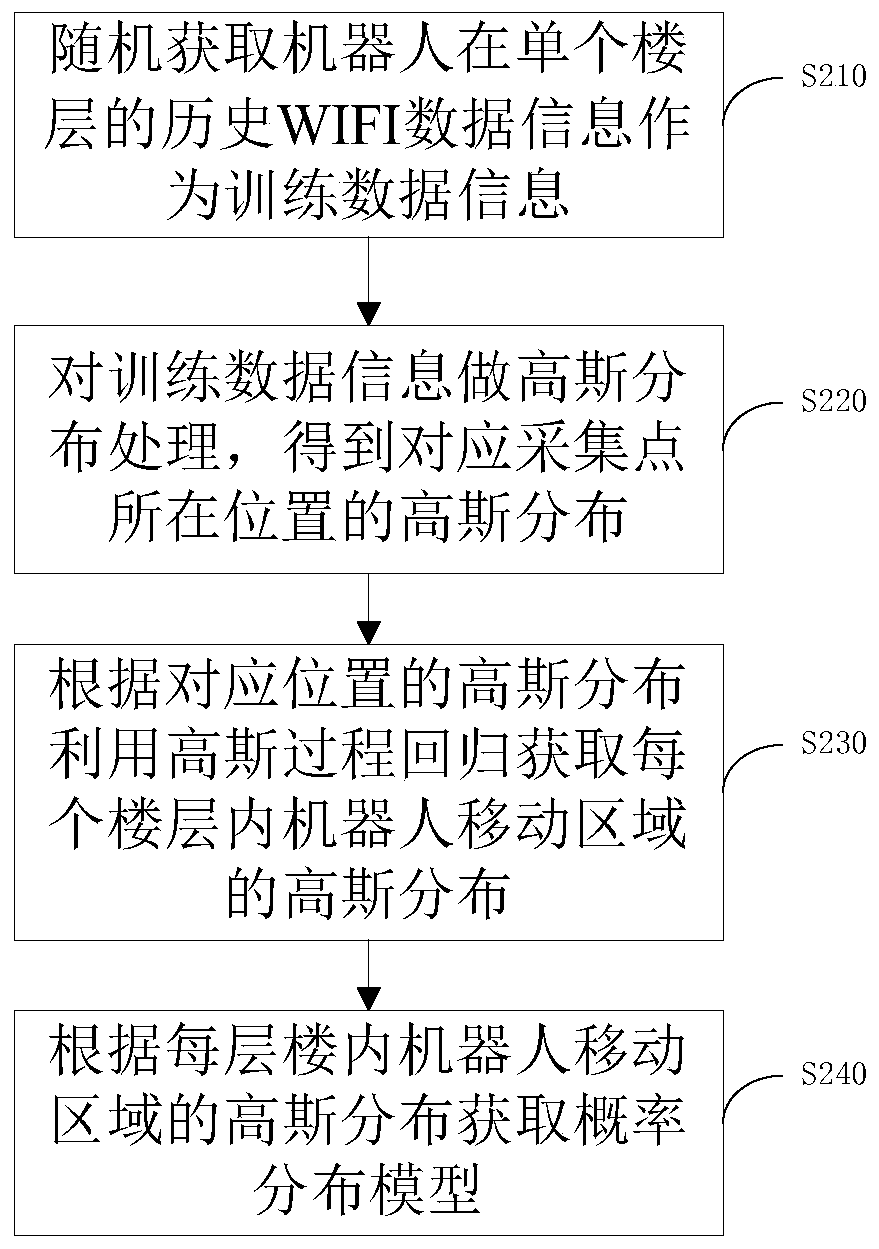
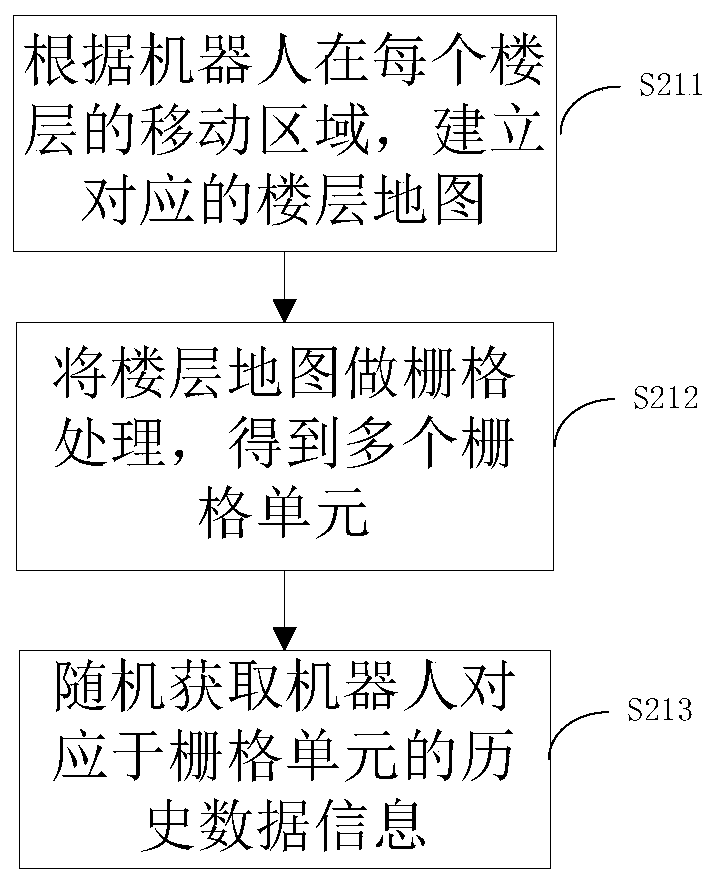
[0067] Step S200: Input th...
Embodiment 2
[0118] The embodiment of the present application also provides a multi-floor positioning system, such as Figure 7 As shown, it is a structural block diagram of the multi-floor positioning system provided by the embodiment of the present application. The system can include:
[0119] The WIFI data information acquisition module 100 is used to acquire the WIFI data information of the current environment of the robot;
[0120] A probability distribution acquisition module 200, configured to input the WIFI data information into a preset probability distribution model, so as to obtain the probability distribution of each grid cell in each floor map;
[0121] The position information acquisition module 300 is configured to acquire the position information of the robot according to the probability distribution of the WIFI data information in each grid cell in each floor map.
[0122] Exemplarily, the WIFI data information includes MAC addresses and multiple signal strengths corresp...
Embodiment 3
[0147] An embodiment of the present application provides an electronic device, the electronic device includes a memory and a processor, the memory is used to store a computer program, and the processor runs the computer program so that the computer device performs any of the steps in Embodiment 1. A multi-floor positioning method described herein.
[0148] The embodiment of the present application also provides a readable storage medium, wherein computer program instructions are stored in the readable storage medium, and when the computer program instructions are read and executed by a processor, any one of Embodiment 1 is executed. The multi-floor positioning method described above.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More