

Lower limb exoskeleton control method and device
A control method and exoskeleton technology, applied in medical science, physiotherapy, diagnosis, etc., can solve the problem that the exoskeleton can only walk passively with a constant gait, achieve good rehabilitation effect and safety, and eliminate potential safety hazards. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
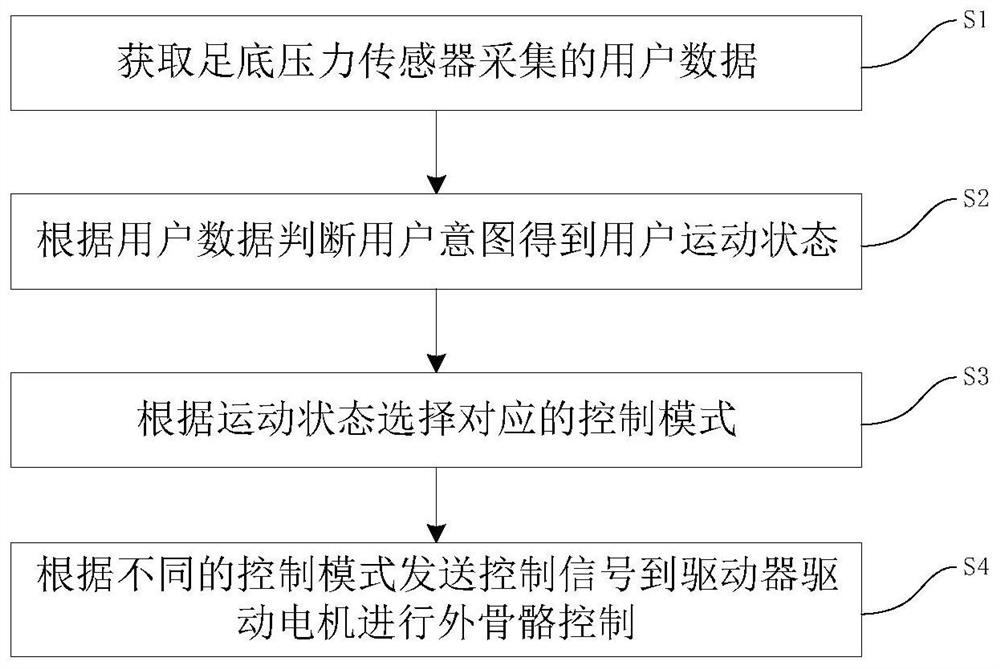
[0049] Embodiment 1 of the present invention provides a lower limb exoskeleton control method, figure 1 The implementation flowchart of the lower limb exoskeleton control method provided by the embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0050] S1: Obtain user data collected by the plantar pressure sensor.
[0051] In this embodiment, the user data includes: the pressure value of the heel of the healthy foot, the pressure value of the heel of the affected foot, and the pressure value of the toe of the healthy foot. The walking speed can be adjusted independently by the motion state of the user's healthy side leg. At different walking speeds, the user data collected by the plantar pressure sensor is different. Further, the plantar pressure sensor can be installed on the sole of the exoskeleton.
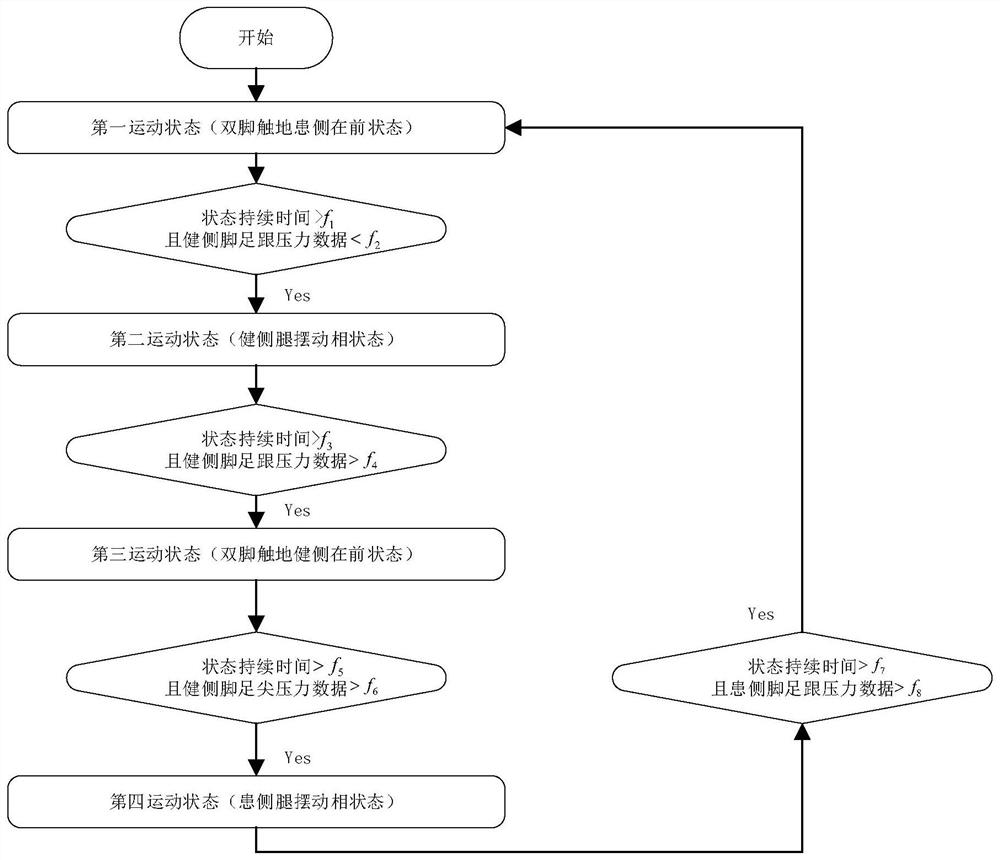
[0052] S2: Determine the user's intention to obtain the user's exercise state according to the user data, and the user'...
Embodiment 2
[0086] Such as Image 6 As shown, it is a structural block diagram of a lower limb exoskeleton control device provided in this embodiment, which is used to implement a lower limb exoskeleton control method as described in Embodiment 1, including:
[0087] Obtaining user data module 10: used to obtain the user data collected by the plantar pressure sensor, the user data includes: the heel pressure value of the healthy side foot, the heel pressure value of the affected foot, and the toe pressure value of the healthy side foot;
[0088]Judging user intention module 20: for judging user intention according to user data to obtain user motion state, user motion state includes: first motion state, second motion state, third motion state and fourth motion state;
[0089] Select control mode module 30: used to select the corresponding control mode according to the motion state, the control mode includes: power assist mode and follow-up mode;
[0090] Exoskeleton control module 40: use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More