

Multi-joint robot engraving machine
A multi-joint robot, engraving machine technology, applied in the direction of manipulator, program control manipulator, metal processing mechanical parts, etc., can solve the problems of engraving quality, damage to engraving knife, low efficiency of knife replacement, etc. scope, increased efficiency, reduced labor and labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
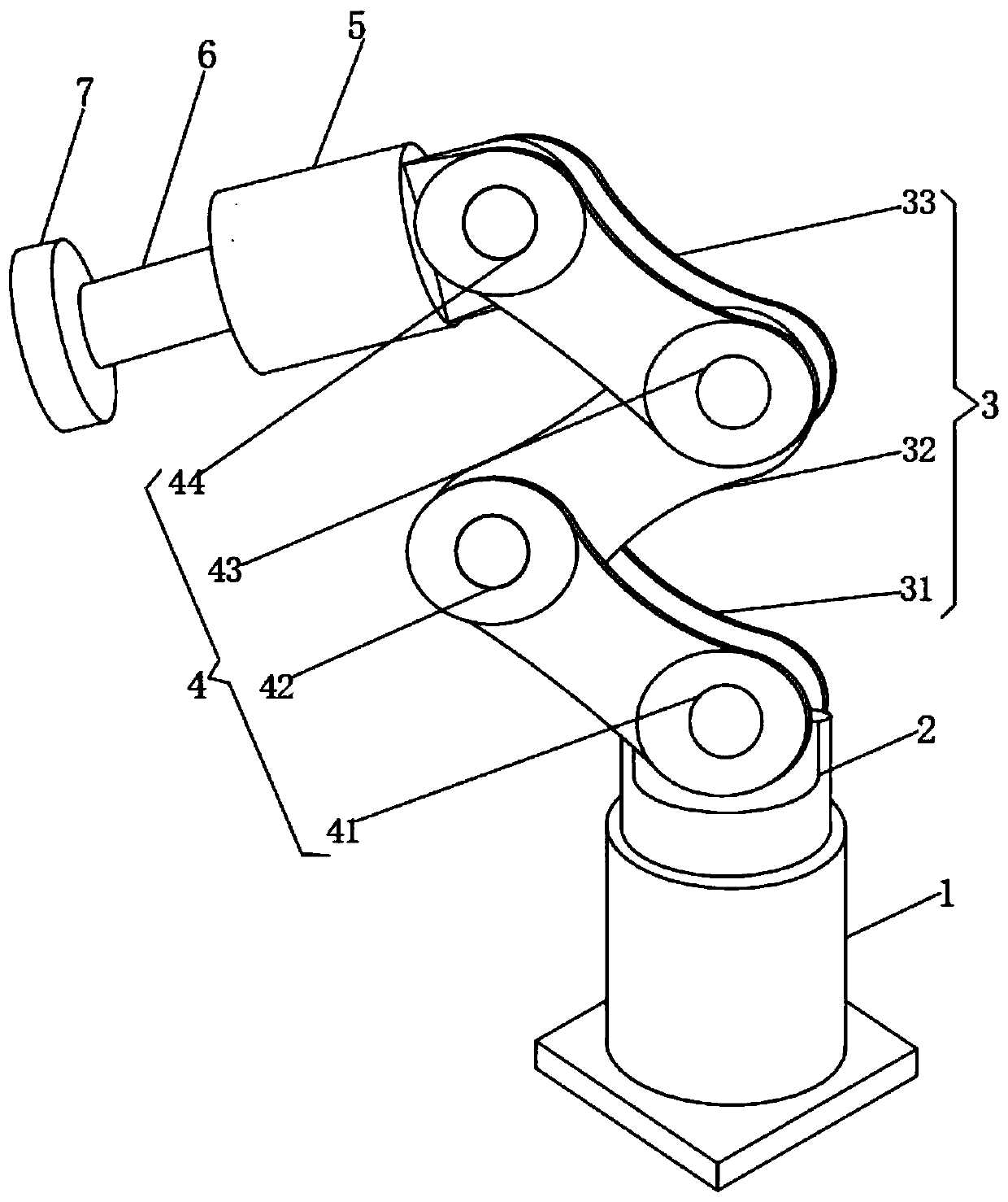
[0029] like Figure 1-4 As shown, the present invention provides a technical solution: a multi-joint robot engraving machine, including a rotating motor 1, the output end of the rotating motor 1 is fixedly connected with a mounting base 2, and the top of the mounting base 2 is fixedly connected with a multi-joint crank arm 3 , the multi-joint crank arm 3 is provided with a second angle motor 4 to adjust the state of the multi-joint crank arm 3, the top of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More