

Robot positioning method and device and storage medium
A robot positioning and robot technology, applied in the direction of measuring devices, active optical measuring devices, instruments, etc., can solve the problems of inaccuracy, single positioning of positioning factors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
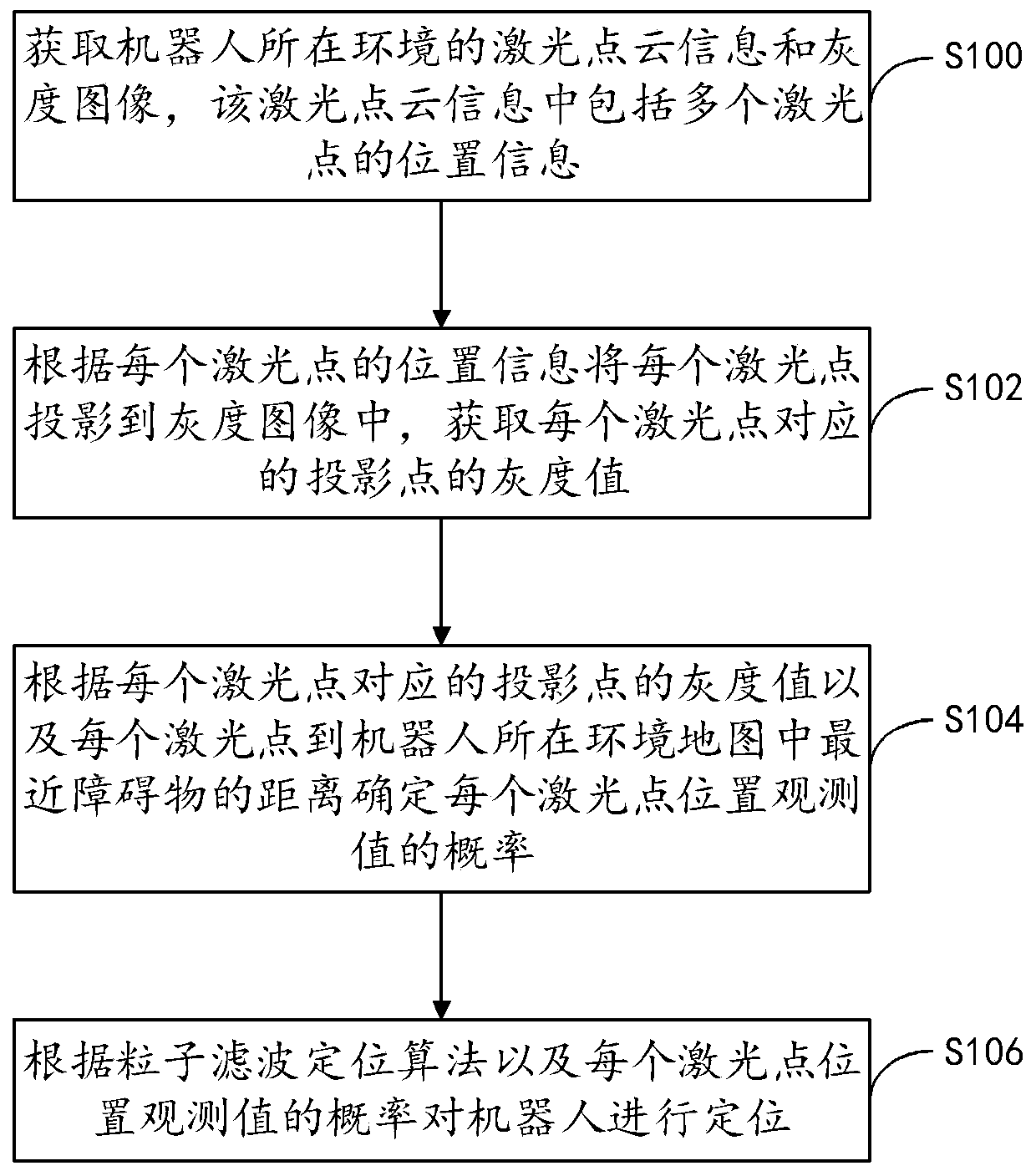
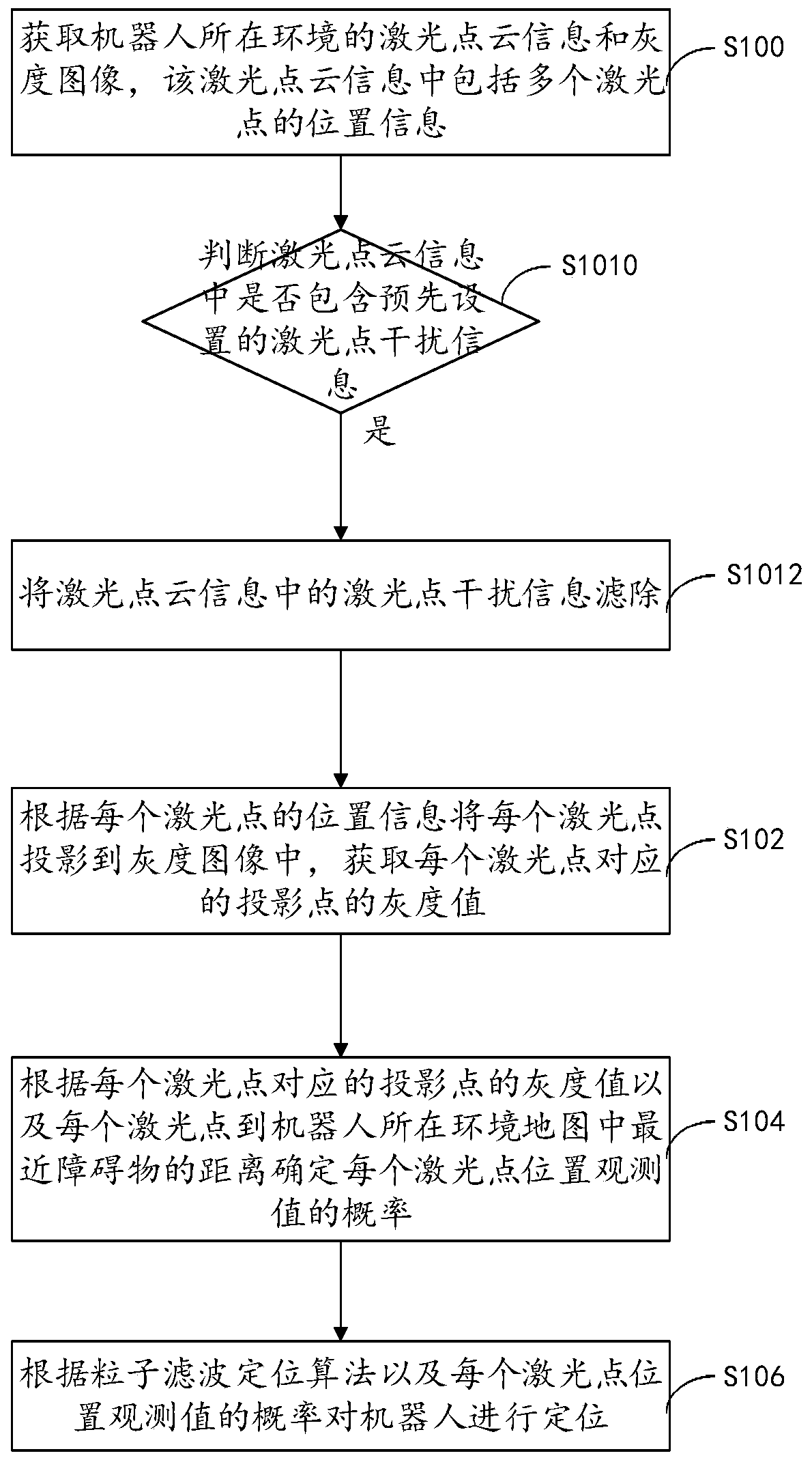
[0051] like figure 1 As shown, the embodiment of the present application provides a robot positioning method, which specifically includes the following steps:
[0052] Step S100: Obtain laser point cloud information and grayscale images of the environment where the robot is located, where the laser point cloud information includes position information of multiple laser points.
[0053] Step S102: Project each laser point into a grayscale image according to the position information of each laser point, and acquire the grayscale value of the projected point corresponding to each laser point.
[0054] Step S104: According to the gray value of the projection point corresponding to each laser point and the distance from each laser point to the nearest obstacle in the environment map where the robot is located, determine the probability of the position observation value of each laser point.
[0055] Step S106: The robot is positioned according to the particle filter positioning alg...
no. 2 example
[0083] Figure 6 A schematic structural block diagram of the robot positioning device provided by the present application is shown. It should be understood that the device is different from the above-mentioned Figure 1 to Figure 5 Corresponding to the method embodiment in the first embodiment, the steps involved in the method in the first embodiment can be performed. The specific functions of the device can refer to the above description. To avoid repetition, the detailed description is appropriately omitted here. The device includes at least one software function module that can be stored in a memory in the form of software or firmware (firmware) or solidified in an operating system (operating system, OS) of the device. Specifically, the device includes: an acquisition module 200, configured to acquire laser point cloud information and grayscale images of the environment where the robot is located, where the laser point cloud information includes position information of mult...
no. 3 example
[0097] like Figure 7 As shown, the present application provides an electronic device 3, including: a processor 301 and a memory 302, the processor 301 and the memory 302 are interconnected and communicate with each other through a communication bus 303 and / or other forms of connection mechanisms (not shown), The memory 302 stores a computer program executable by the processor 301. When the computing device is running, the processor 301 executes the computer program, so as to execute the first embodiment and any optional implementation manner of the first embodiment. Method, such as step S100 to step S106: obtain the laser point cloud information and grayscale image of the environment where the robot is located, the laser point cloud information includes the position information of multiple laser points; according to the position information of each laser point, each laser point Points are projected into the grayscale image, and the grayscale value of the projection point corr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More