

Embedded airborne infrared image visual navigation positioning method
An infrared image and visual navigation technology, applied in the field of unmanned aerial vehicles, can solve the problems of small detection angle, low flying height, and easy to be affected by building occlusion, achieve high-frequency noise suppression, improve positioning coordinates, and reliably extract targets. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
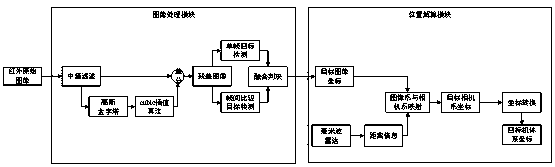
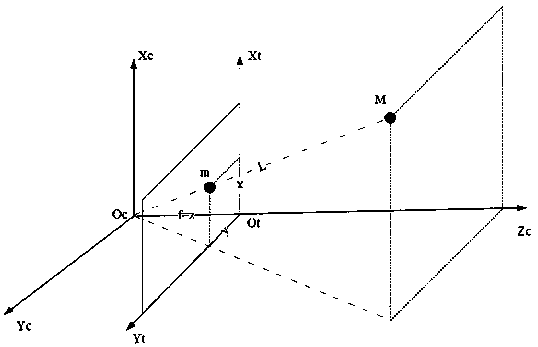
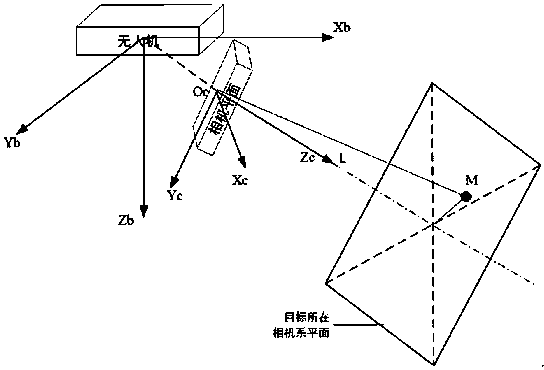
[0034] see Figure 1-3 , the present invention provides a kind of technical scheme: a kind of embedded airborne infrared image visual navigation positioning method, comprises the following steps:
[0035] Step 1: Read the original infrared image f(x,y) collected by the camera, process the image with the background suppression algorithm, and obtain the corrected image f 1 (x,y);
[0036] Step 2: Use different detection algorithms to suppress...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More