

A method and system for continuous prediction of wrist joint torque in multi-grasp mode
A prediction method and joint torque technology, which is applied in prediction, neural learning methods, medical simulation, etc., can solve the problems of huge price of instruments, unconsidered differences, torque prediction deviation, etc., and achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
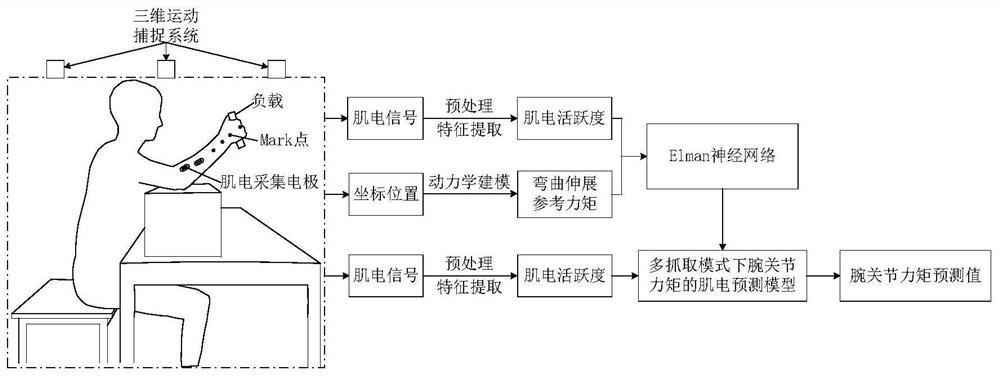
[0127] A method for continuously predicting wrist joint torque in a multi-grab mode, comprising the following steps:
[0128] S100, the multi-grabbing mode includes using multiple gestures to grab loads of different sizes. Gestures include but not limited to G gestures such as grasping gestures, thumb, index finger and middle finger three-finger pinching, and loads include but not limited to N common loads such as 60g, 480g, 960g, etc., use different gestures to grab different loads to form a total of I=G*N grabbing modes; After the collection, change the capture mode and continue to collect data. The following takes the sth gesture to capture the nth load as an example to describe in detail;
[0129] S200, using the three-dimensional motion capture system to record the wrist bending / extending angle information during the bending / extending movement of the wrist joint in the s gesture grasping the nth load grasping mode, specifically including the following steps:
[0130] S2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More