Guide wire clamping and rubbing device of interventional operation robot
A technology for interventional surgery and a clamping device, applied in the field of minimally invasive vascular interventional surgery, can solve the problems of complex robot structure and the inability of the robot to accurately control the clamping guide wire, etc., achieve simple and convenient control methods, avoid X-ray damage, and achieve high precision high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
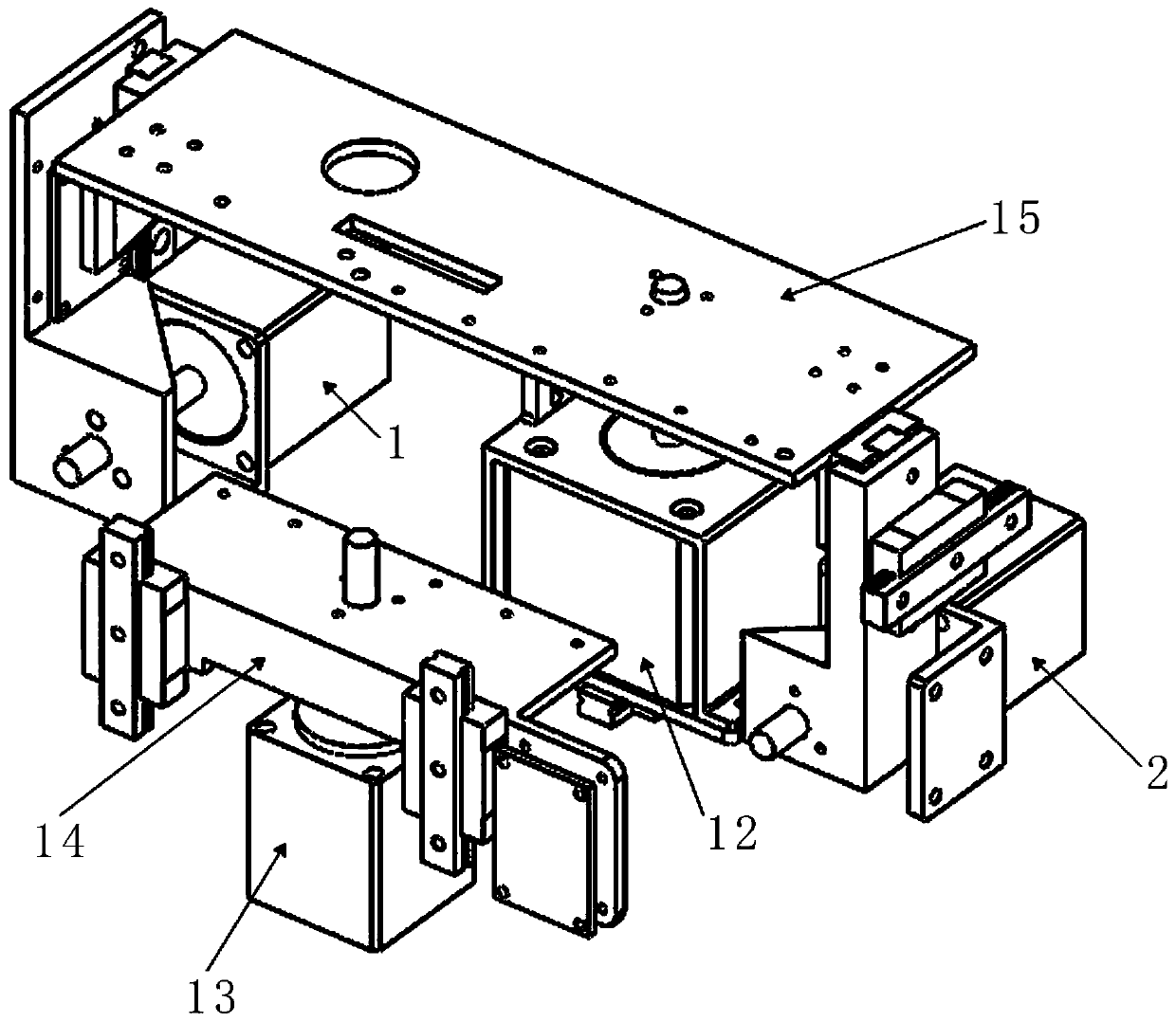
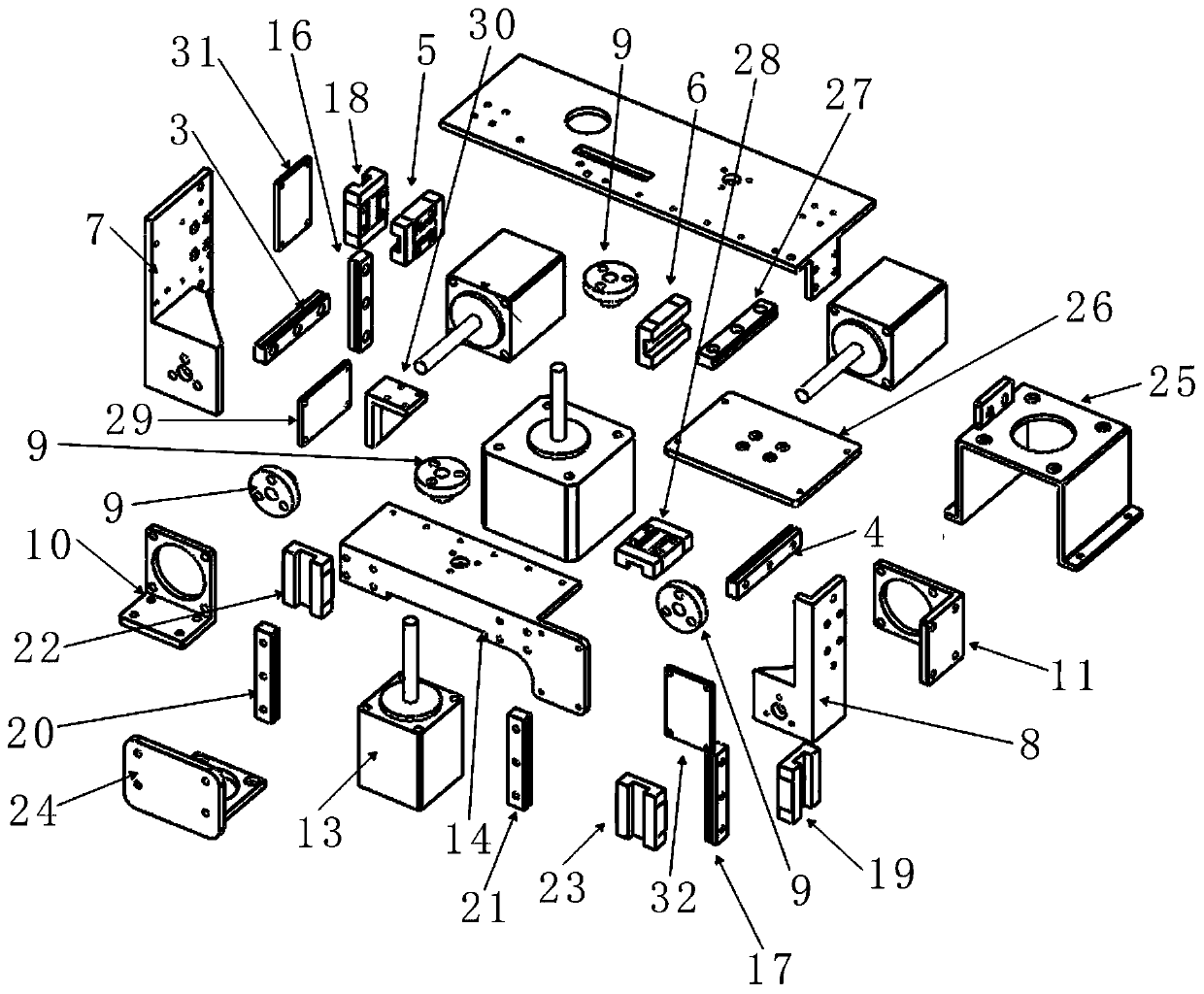
[0048] The following is based on Figure 1-2 A guide wire clamping and rubbing device for an interventional surgery robot according to an embodiment of the present invention is described in detail.
[0049] The embodiment of the present invention discloses a guide wire clamping and rubbing device for an interventional surgery robot. It solves the problem of control, provides a structure and method capable of rubbing the guide wire, and provides technical support for the surgical operation like a real doctor.
[0050] like Figure 1-2 As shown, the guide wire clamping and rubbing device of the interventional surgery robot includes two parts: a guide wire clamping device and a guide wire rubbing device, both of which move independently and are used together. Among them, the guide wire clamping device is located in the rear part, and the guide wire rubbing device needs to be completed by cooperation of the front and rear parts.
[0051] specific,
[0052] The guide wire clamp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com