

Cliff detection method, mobile robot control method and mobile robot
A mobile robot and robot body technology, applied in the field of mobile robots, can solve the problems that mobile robots are easy to fall off cliffs, and achieve the effects of reducing the risk of falling into cliff areas, reducing inertia, and reducing misjudgment of cliffs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
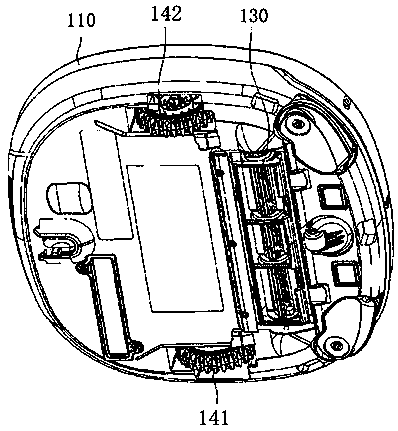
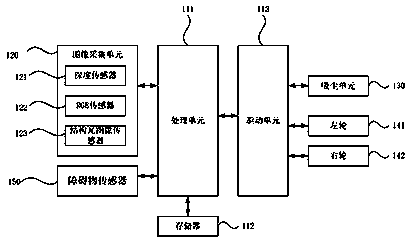
[0065] refer to Figure 1A and Figure 1B , an embodiment of the mobile robot 100 provided in the present application includes: a robot body 110 , an image acquisition unit 120 , a dust collection unit 130 , a left wheel 141 and a right wheel 142 .
[0066] The robot body 110 includes a processing unit 111, a memory 112 and a drive unit 113.
[0067] The image acquisition unit 120 may include but not limited to: a ToF (Time of Flight) image sensor 121 , an RGB sensor 122 or a structured light image sensor 123 .
[0068] The ToF image sensor 121 can measure the distance from the robot body 110 to the ground reference point in front according to the time difference between the emitted light and the received light, and generate an image containing the depth information and brightness information of the ground in front according to the above distance.
[0069] The RGB sensor 122 can capture an RGB image of the ground ahead, and the RGB image is also called a color image.
[0070...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More