Indoor scene real-time reconstruction tracking service method based on elderly care robot
An indoor scene and service method technology, applied in real-time 3D scene reconstruction, indoor scene real-time reconstruction and tracking service based on elderly care robots, can solve the problems that indoor 3D reconstruction is not very prominent, cannot provide diversified services, and has a single service function, and achieves Reconstruction costs are low, costs are low, and the effect of improving service quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
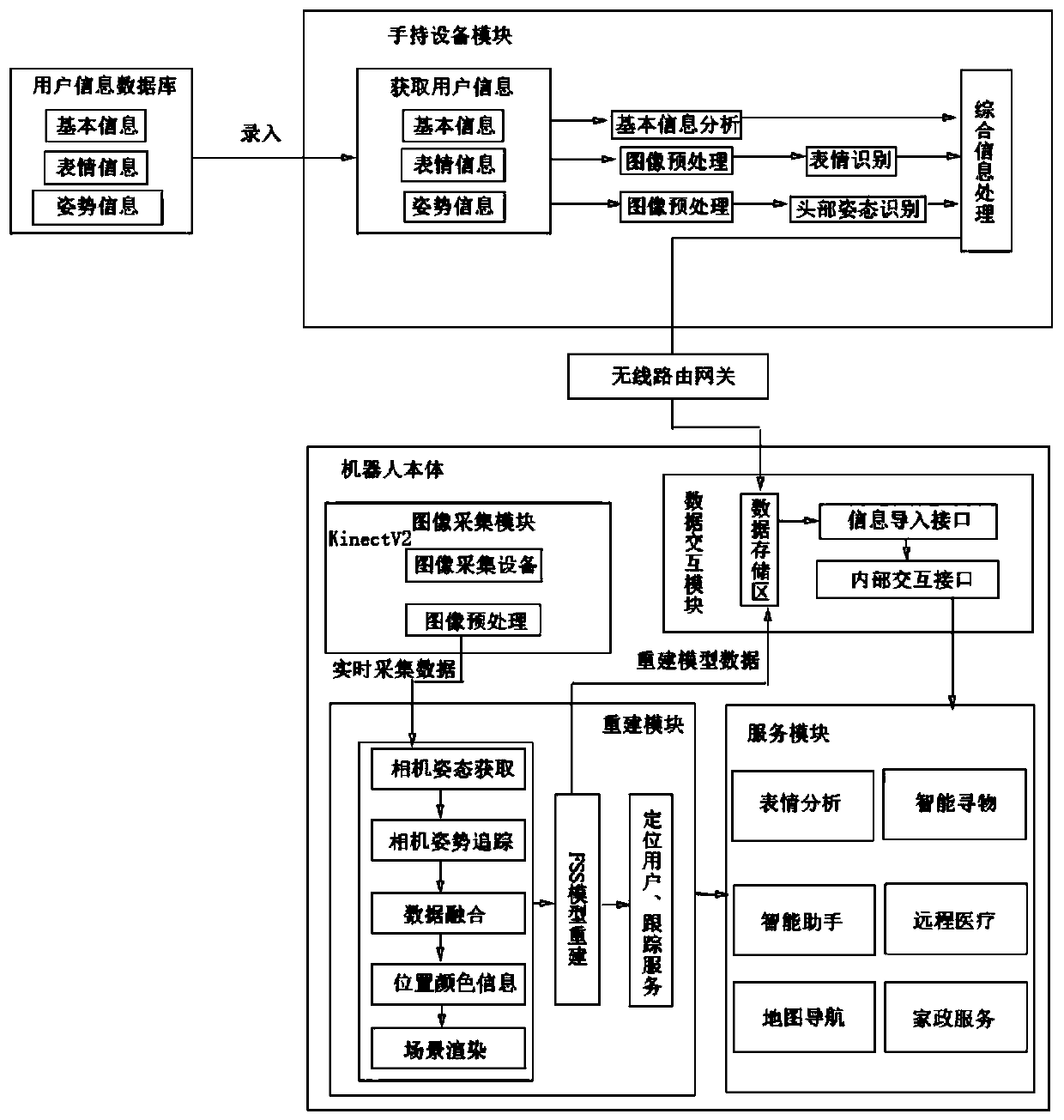
[0080] In order to make the purpose, technical solution and advantages of the present invention clearer, the following will further describe the implementation of the present invention in detail in conjunction with the accompanying drawings. figure 1 The overall method framework of the present invention is shown. Here we provide an implementation process of an indoor scene real-time reconstruction and tracking service method based on an elderly care robot implemented by the present invention for reference.
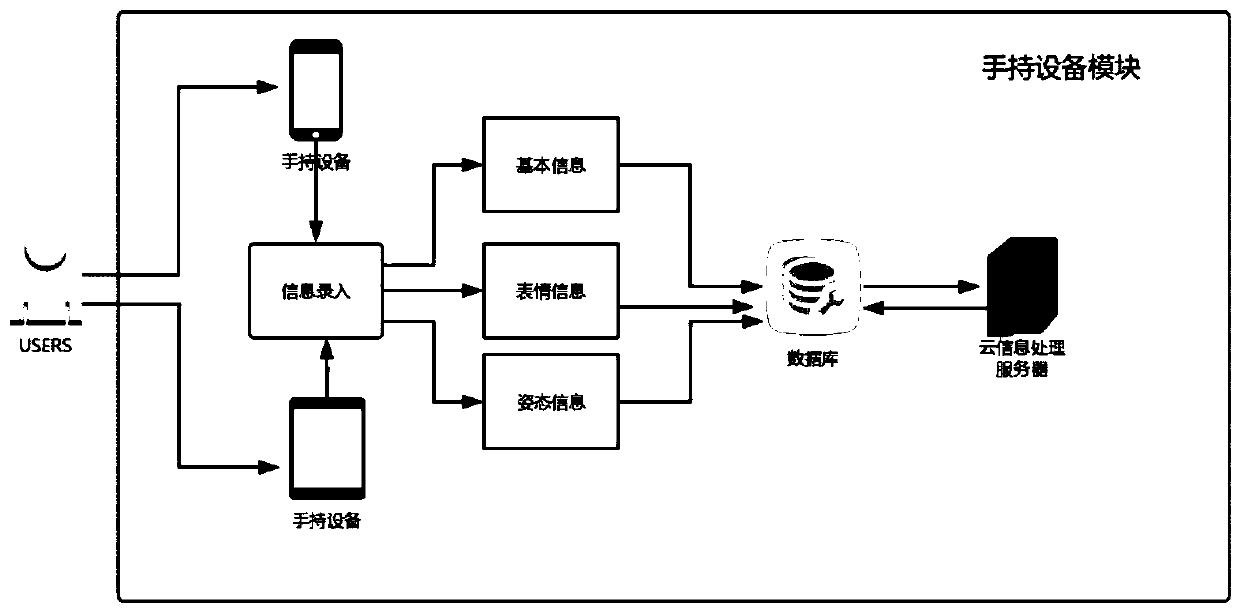
[0081] The present invention proposes a real-time reconstruction and tracking service system of indoor scenes based on elderly care robots. The elderly are equipped with a handheld device to allow them to control the robot, and transmit their own information to the elderly care robot body, and the robot uses the Kinect depth camera to complete the scene The real-time reconstruction work, and the reconstructed data information is applied to the service function module.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com