

Tool track interpolation and speed planning method based on machine tool vibration suppression
A technology of vibration suppression and tool trajectory, applied in the field of CNC machining
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0173] In this embodiment, a tool trajectory interpolation and speed planning method based on machine tool vibration suppression is described, and the specific steps are as follows:
[0174] (1) Step 1, read the G01 track point into the memory of the numerical control system.
[0175] (2) Step 2, for the G01 trajectory segment obtained in step 1, design G that satisfies the chord error constraint 4 Continuous interpolation trajectory, the specific operation method is as follows:
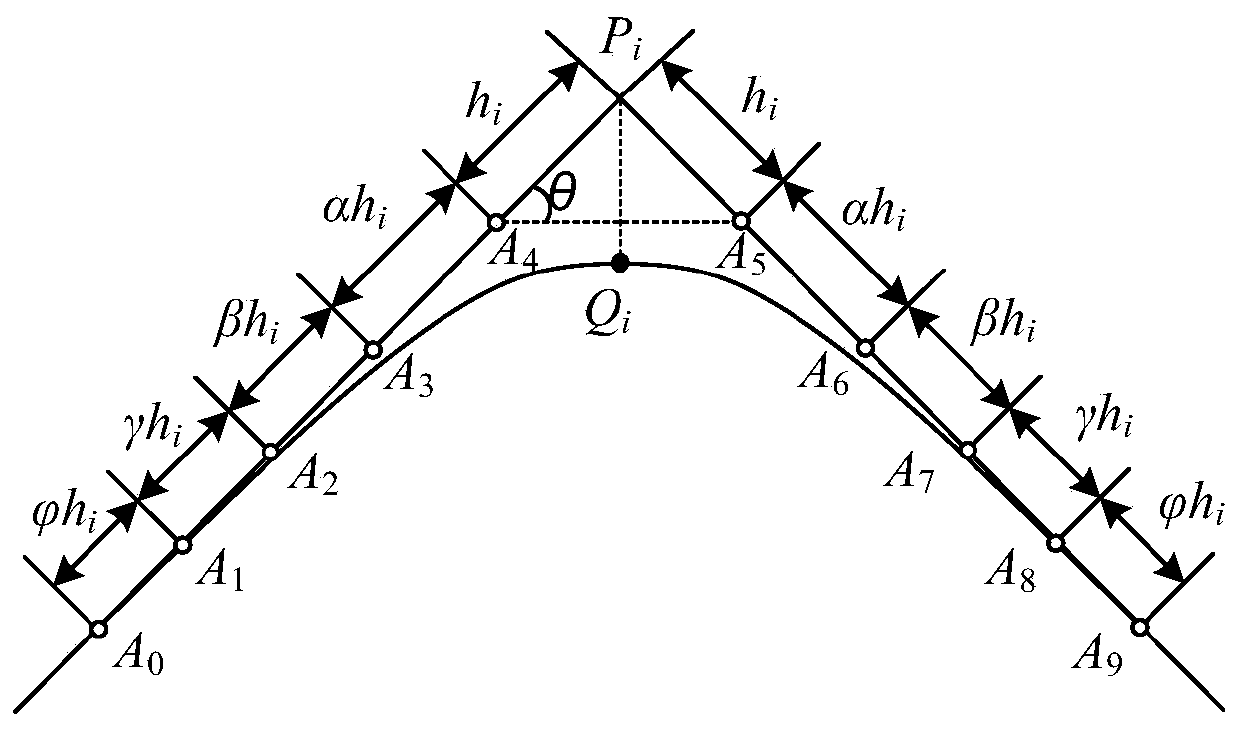
[0176] Step 2-1, establish G at the corner of the G01 trajectory 4 Geometric Model of Continuous Transition Curves
[0177] Trajectory corner P i-1 P i P i+1 The transition curve at is composed of symmetrical nine-degree Bezier curves, such as figure 1 As shown, the mathematical form of the transition curve is shown in formula 1:
[0178]
[0179] In formula (1) A i represents a control point that satisfies where α, β, γ, is the control point ratio (CPR), and the value of the contr...
Embodiment 2
[0308] Based on a tool trajectory interpolation and speed planning method based on machine tool vibration suppression provided in Embodiment 1, specific application cases are shown in the following three links:
[0309] (1) The trajectory point of the "dolphin" model {P i} i=0…219 Read into the memory of the CNC system, the G01 track point of the model is as follows Figure 6 shown;
[0310] (2) Read the G01 trajectory segment from the memory {P i} i=0…219 , design G that satisfies the chordal error constraint 4 Continuously interpolated trajectories. Let the chord error constraint of the trajectory be δ=0.04mm, and the calculation accuracy be ε=10 -4 mm, use the algorithm InterG4 provided in steps 2-4 to calculate the G of the "dolphin" model 4 Continuous interpolation trajectory, the trajectory curve generated by 4 iterations is recorded as: Determine {P according to formula (2) i (4)} The CPR value at each corner of the sequence, calculated according to the CPR v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More