

Conveyor belt upper contour trajectory tracking control system and method
A trajectory tracking and control method technology, applied in the field of robotics, can solve the problems of low automation level, the workpiece can not meet the process requirements, and can not meet the high precision requirements, so as to improve the defects of the machined parts, improve the trajectory following accuracy, and realize the trajectory The effect of dynamic follow
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
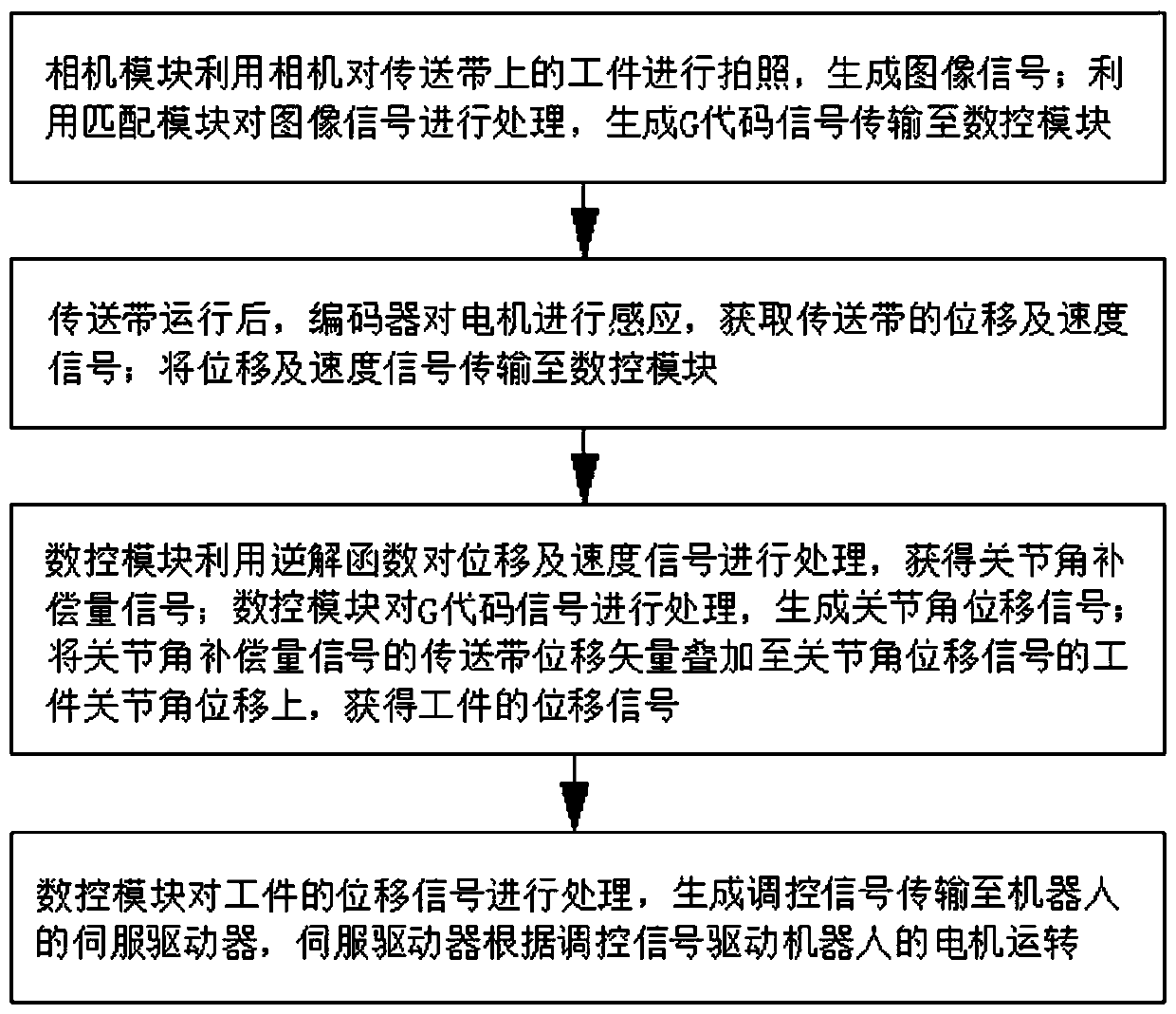
[0044] Such as figure 1 As shown, a contour trajectory tracking control method on a conveyor belt includes the following steps:
[0045] Step 1. The camera module 1 uses the camera to take pictures of the workpiece on the conveyor belt to generate an image signal; uses the matching module 2 to process the image signal, obtains the G code signal and transmits it to the numerical control module 4;
[0046] Step 2. After the conveyor belt runs, the encoder 3 senses the motor 6 to obtain the displacement and speed signals of the conveyor belt; the displacement and speed signals are transmitted to the numerical control module 4;
[0047] Step 3. The numerical control module 4 uses the inverse solution function to process the displacement and speed signals to obtain the joint angle compensation signal; the numerical control module 4 processes the G code signal to generate the joint angle displacement signal; the conveyor belt displacement of the joint angle compensation signal The ...
Embodiment 2
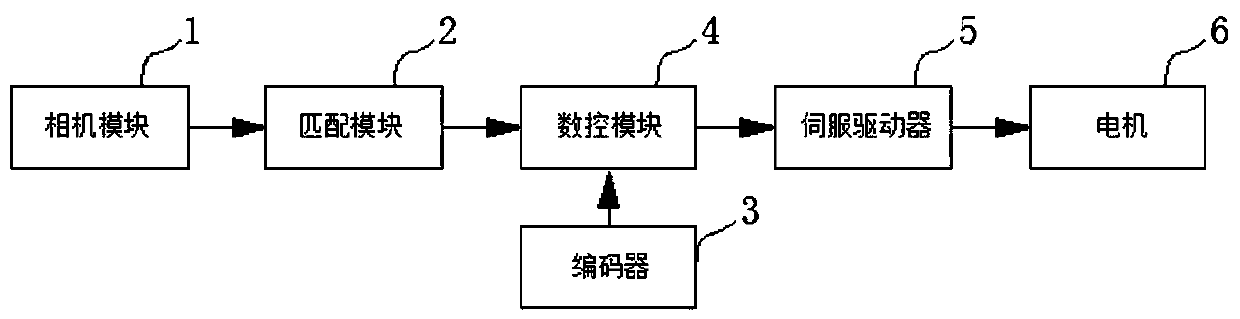
[0067] Such as image 3 As shown, a contour trajectory tracking control system on a conveyor belt includes:
[0068] A camera module 1, the camera module 1 uses a camera to take pictures of the workpiece on the conveyor belt to generate an image signal;
[0069] A matching module 2, the matching module 2 processes the image signal, acquires a G code signal and transmits it to the numerical control module 4;
[0070] Encoder 3, described encoder 3 senses motor 6 after conveyor belt runs, and obtains the displacement and speed signal of conveyor belt;
[0071] Numerical control module 4, described numerical control module 4 utilizes the inverse solution function to process displacement and speed signal, obtains the joint angle compensation amount signal; Numerical control module 4 processes G code signal, generates joint angle displacement signal; Joint angle compensation amount signal The displacement vector of the conveyor belt is superimposed on the joint angular displaceme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More