

Silicon micro-gyroscope interface circuit suitable for industrial robot attitude measurement
A technology of industrial robots and silicon micro-gyroscopes, applied in the measurement of electrical variables, resistance/reactance/impedance, measurement devices, etc., can solve the problem of being easily interfered by external factors, and achieve the effect of high signal accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0028] Such as figure 1 As shown, the gyro meter 1 is connected to the tiny capacitance detection module 2 , the amplification module 3 is connected to the tiny capacitance detection module 2 , and the bandpass filter module 4 is connected to the amplification module 3 .
[0029] The small capacitance output by the gyro meter 1 in the robot is converted into a voltage by the capacitance detection module 2, the voltage output by the detection module 2 is amplified by the amplification module 3, and the band-pass filter module 4 passes the signal output by the amplification module 3 out of the passband noise signal filtering.
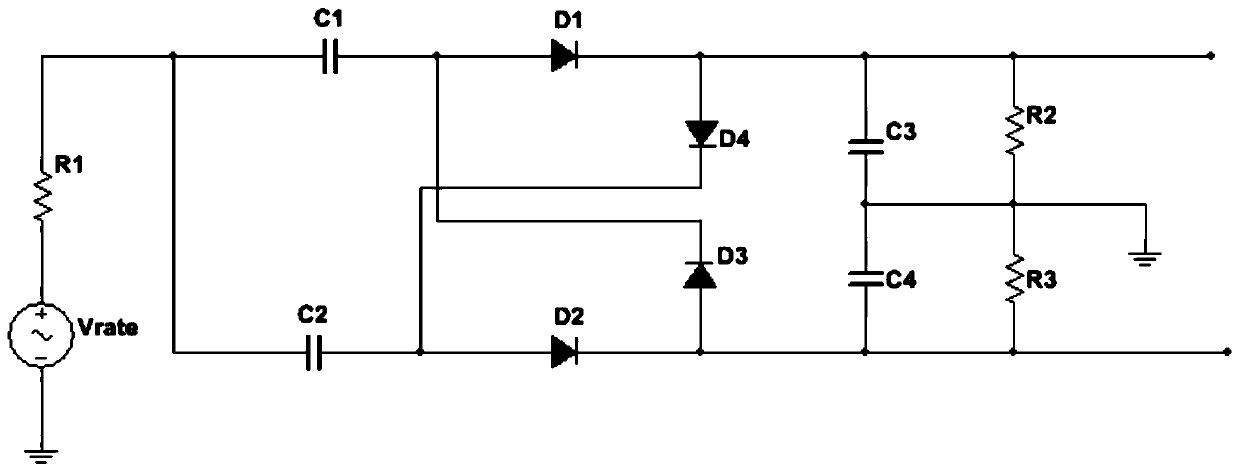
[0030] Such as figure 2 As shown, one end of the single carrier Vrate is connected to the first resistor R1, and the other end is connected to the ground; one end of the first differential capacitor C1 is connected to the other end of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More