

Probability terrain estimation method based on uncertainty analysis
A technology of uncertainty and terrain, applied in the field of terrain reconstruction, can solve the problem that the terrain environment cannot be accurately perceived
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0081] The present invention provides a probabilistic terrain estimation method based on uncertain analysis, the method is based on a patrol platform and sensors, and the patrol platform includes a patrol body and inherent sensors of the patrol platform, including the following steps:
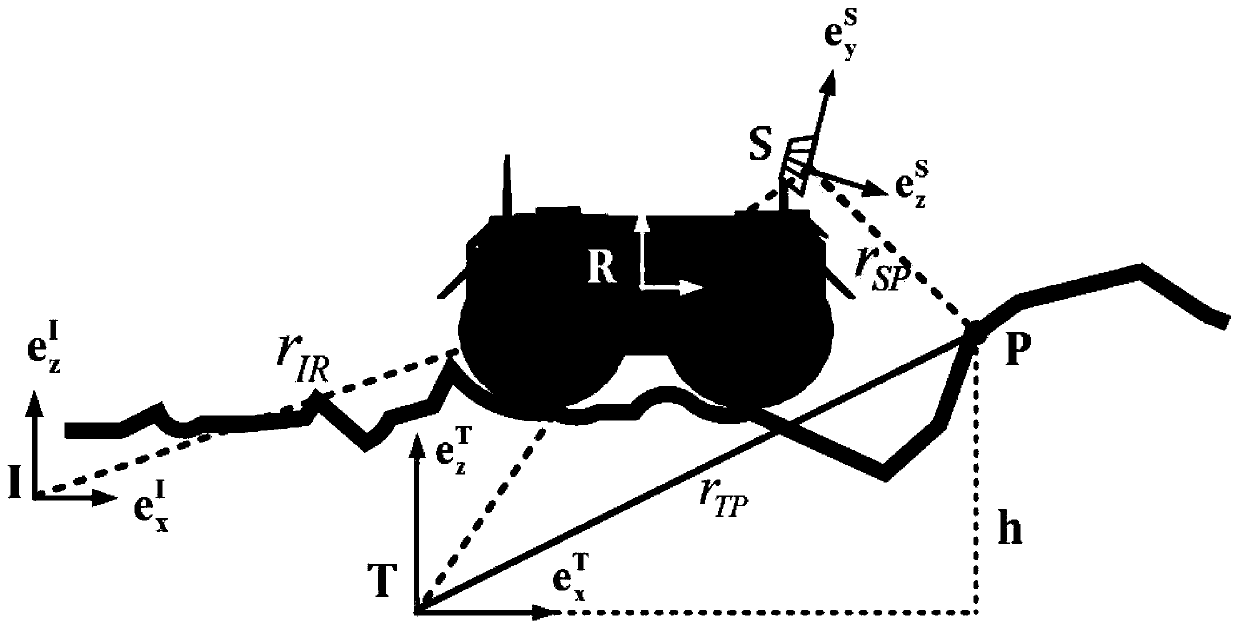
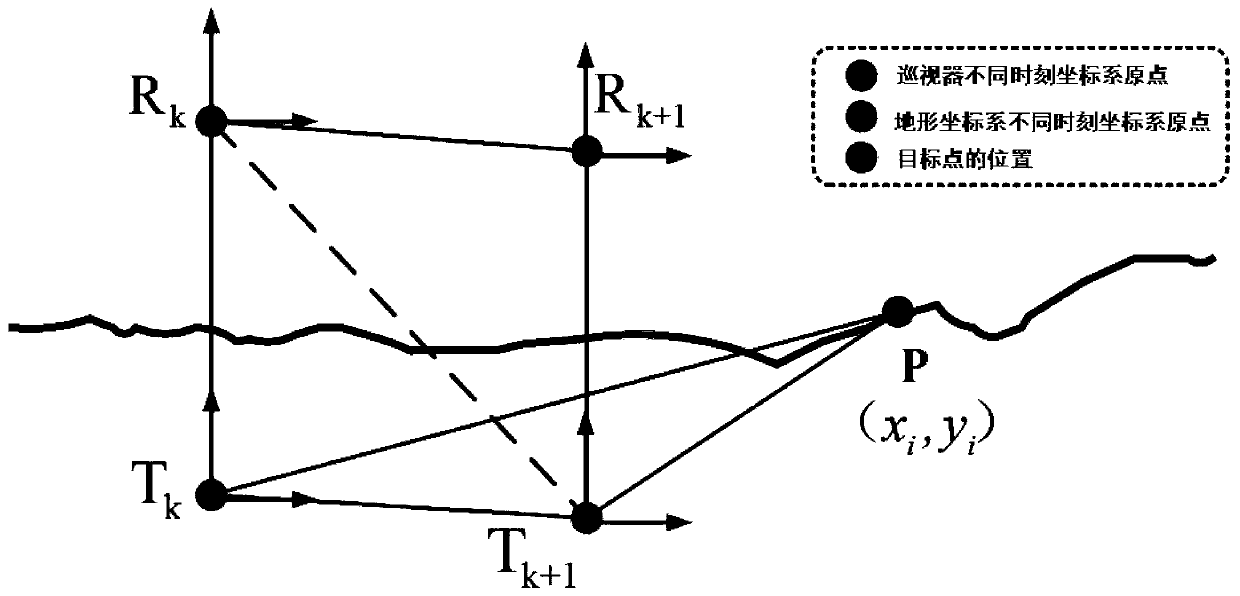
[0082] Step 1: Establish a patrol coordinate system, which includes an inertial coordinate system I, a terrain coordinate system T, a patrol platform body coordinate system R, and a sensor coordinate system S, and determine the covariance matrix of the patrol platform's pose at different times;
[0083] according to figure 1 As shown, the present invention defines four coordinate systems, which are inertial coordinate system I, terrain coordinate system T, patrol body coordinate system R, and sensor coordinate system S. Among them, the inertial coordinate system is fixed in the inertial space, the coordinate system of the patrol body is fixed at the center of mass of the patrol, and the coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More