

Deep mine environment monitoring robot system and monitoring method
A robotic system and environmental monitoring technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as increased manpower, material costs, unrecoverable monitoring devices, damage to roadway surrounding rocks, etc., to achieve diversification of applicable occasions , long communication distance and high degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
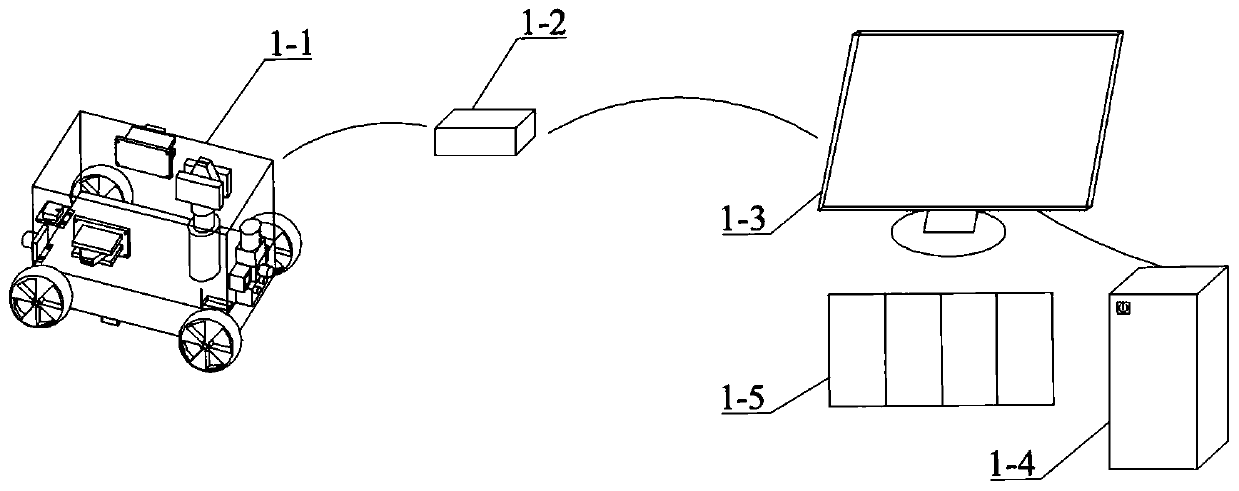
[0044] A deep mine environment monitoring robot system, such as figure 1 As shown, the environmental monitoring robot system includes: an environmental monitoring robot 1-1, a mining wireless communication network 1-2 and an environmental monitoring robot remote workstation; 1-4. Composed of operating consoles 1-5, the environment monitoring robot 1-1 and the environment monitoring robot remote workstation communicate through the mining wireless wireless communication network 1-2.
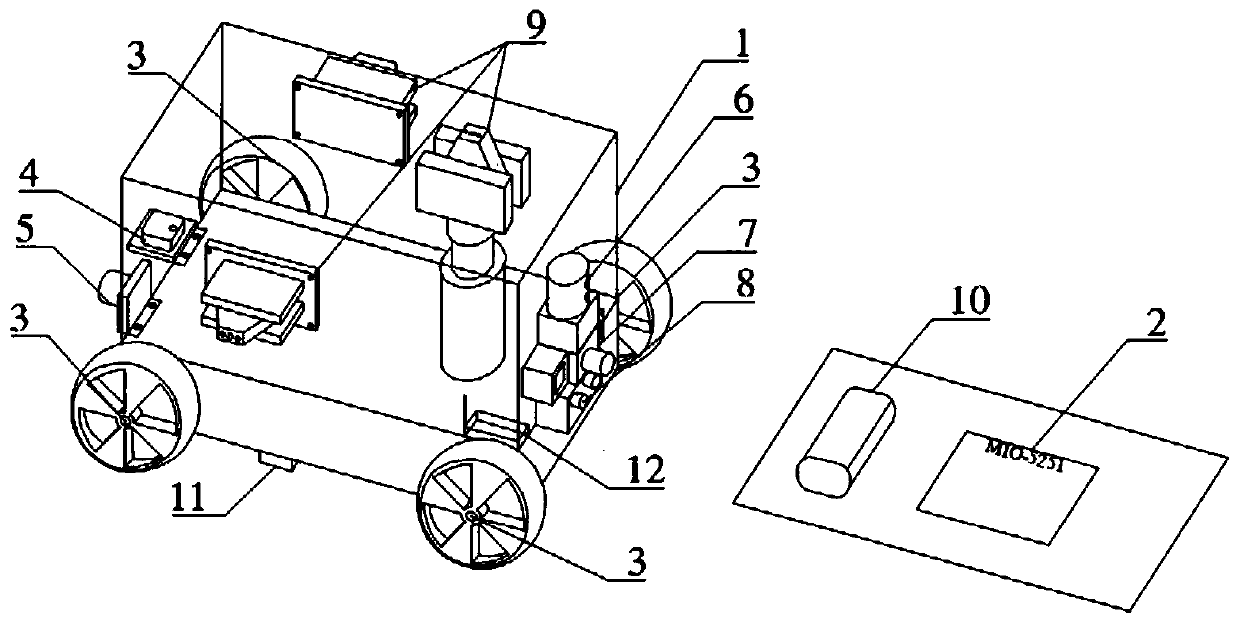
[0045] Such as figure 2 As shown, the environment monitoring robot consists of a trolley frame 1, a main controller 2, a drive mechanism 3, a temperature and humidity sensor 4, a gas detection sensor 5, a laser radar 6, a TOF depth camera 7, an obstacle sensor 8, and a deformation scanning mechanism 9. Composed of a rechargeable battery 10, an RFID tag 11, and a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More