

Rail weld joint grinding robot capable of achieving flexible grinding
A robot and industrial robot technology, applied in the direction of grinding machines, manipulators, abrasive belt grinders, etc., can solve the problems of incomplete welding seam grinding, damage to the track body, etc., and achieve the effect of avoiding track damage, avoiding excessive grinding, and improving grinding efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
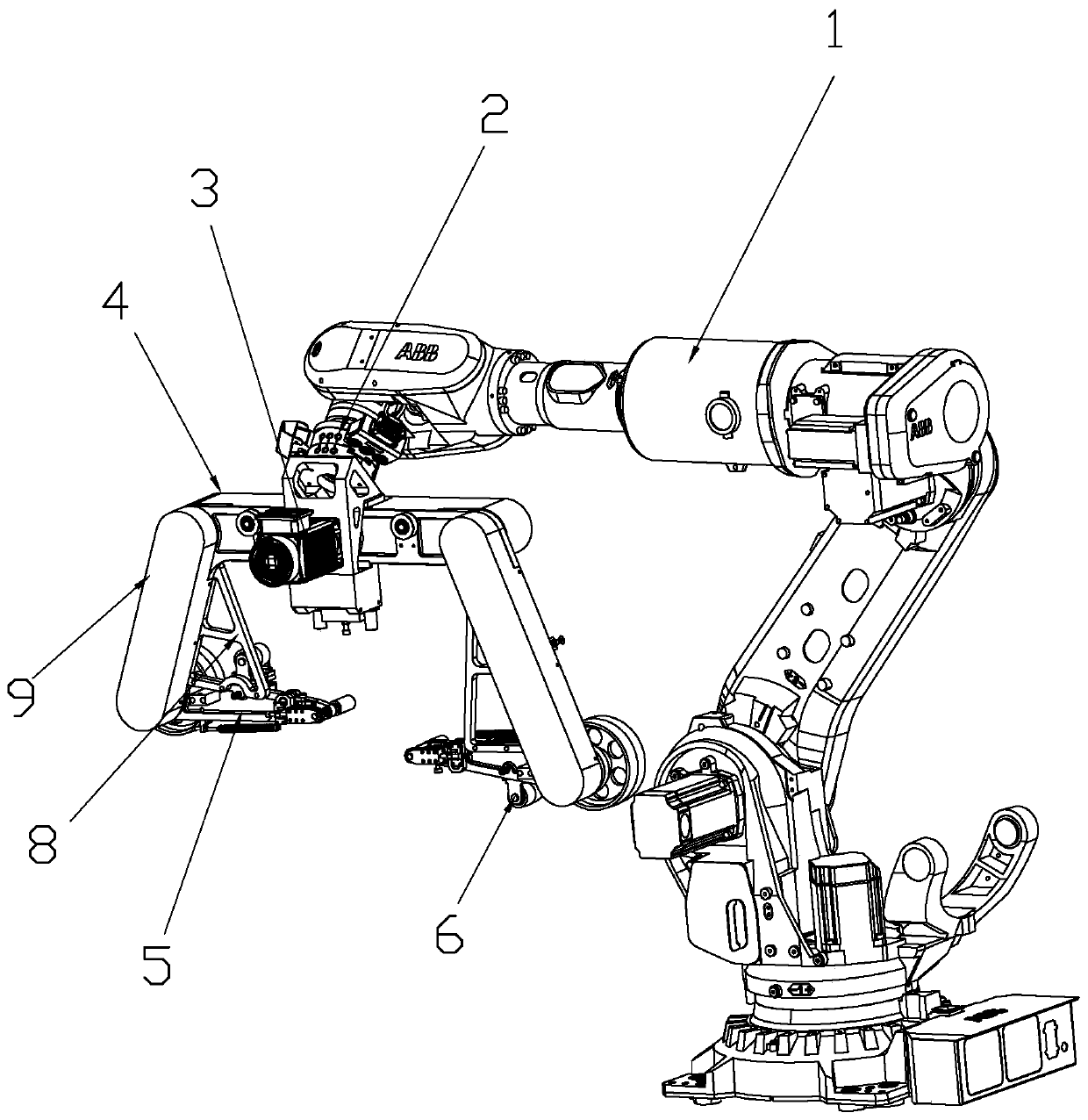
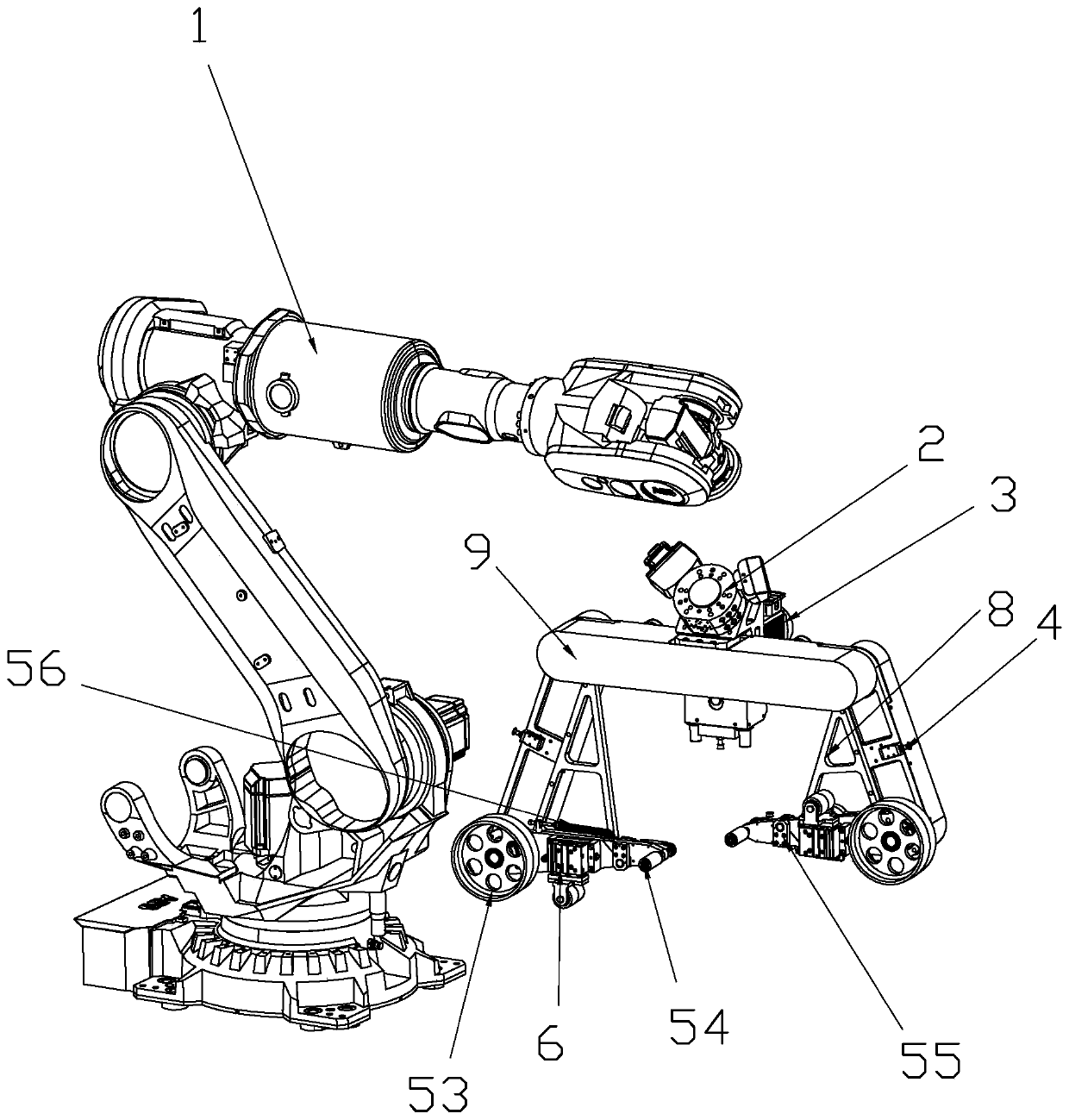
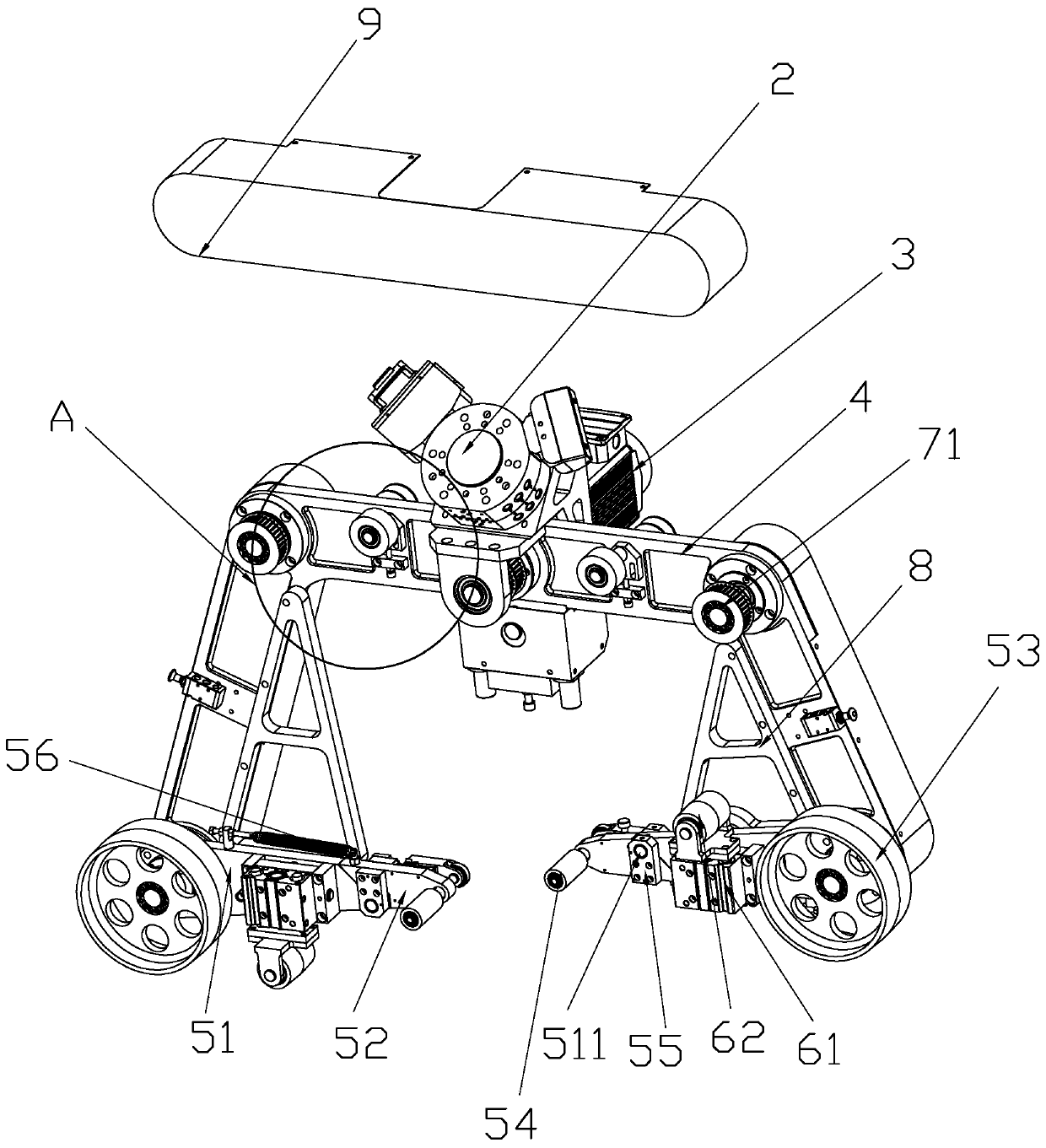
[0036] Such as Figure 1-Figure 9 As shown, a flexible grinding orbital weld grinding robot includes an industrial robot 1 and a flexible grinding device detachably connected to the industrial robot 1. The flexible grinding device includes a connector 2 connected to the end of the industrial robot 1 and fixed on the connection The driving motor 3 on the head 2, the movable support 4 movably connected with the driving motor 3, and the abrasive belt wheel assembly 5 arranged at both ends of the movable support 4 for polishing the track, the output end of the driving motor 3 is set after passing through the movable support 4 The driving wheel 31 drives the abrasive belt wheel assembly 5 to operate. The abrasive belt wheel assembly 5 includes an abrasive belt arm 51 fixedly connected to the movable support 4, and a floating arm 52 movably connected to the abrasive belt arm 51. The main wheel 53 on the arm 51 that is linked to the drive wheel 31, the fixed wheel 54 that is arranged ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More