

Multi-joint manipulator and mechanical arm
A manipulator and multi-joint technology, applied in the field of manipulators, can solve the problems of difficulty in realizing fast or individual gripping of different objects, affecting the efficient and stable normal operation of multi-joint manipulators, affecting the safe grasping effect of manipulators, etc. The effect of the opposite grasping operation of the angle, realizing the object grasping operation, and improving the ability to grasp the object
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
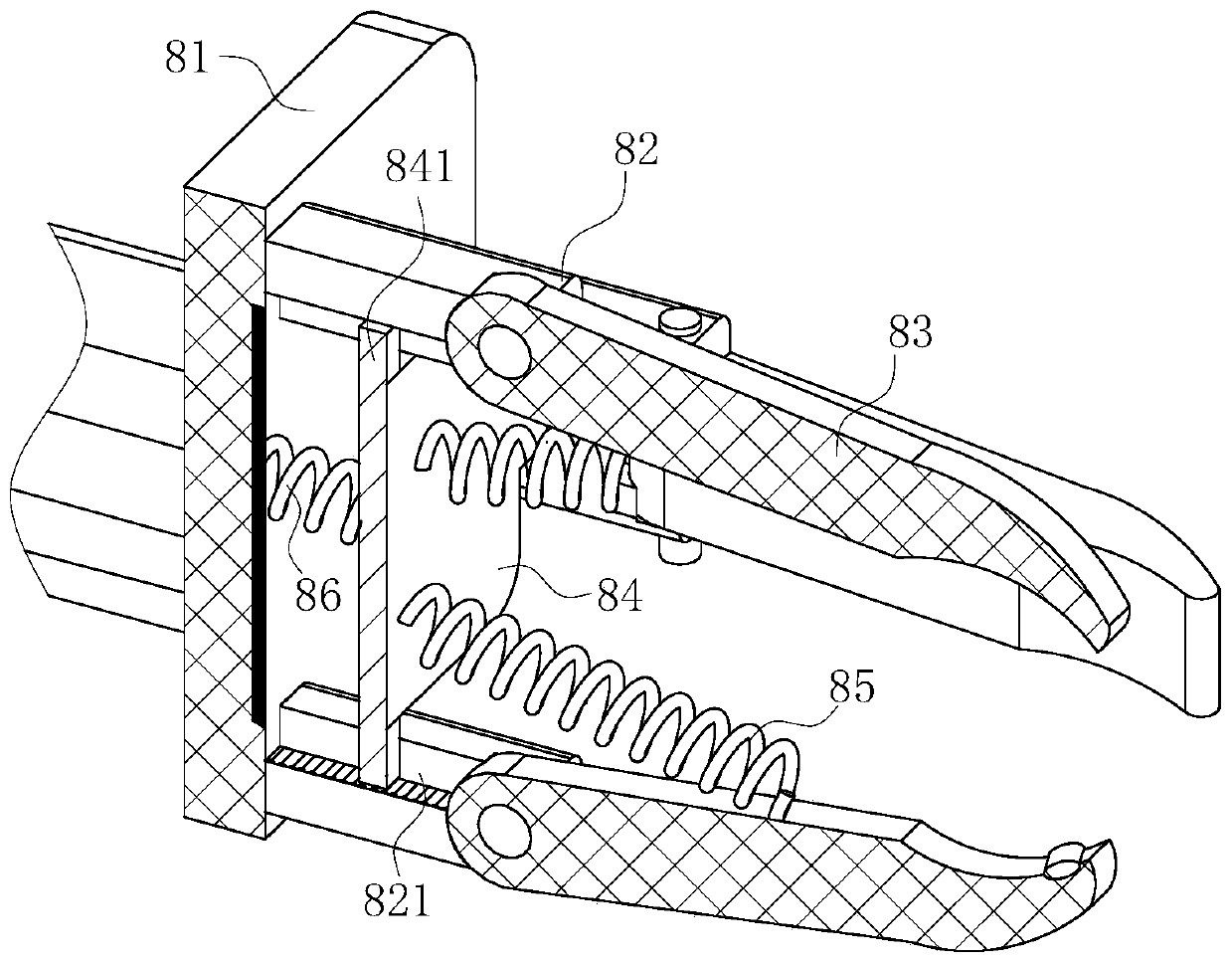
[0029] As an embodiment of the present invention, the mechanical gripper 8 includes a support plate 81, a support column 82, a clamping arm 83, a metal slide plate 84, a rubber connection spring 85 and a rubber limit spring 86; the support plate 81 Installed on the telescopic end of the guide cylinder, and the support plate 81 is provided with an electromagnet; the support plate 81 is equipped with a plurality of support columns 82, and the plurality of support columns 82 are connected to the clamping arm 83 through the rotation column 64; The inner wall of the support column 82 is in sliding contact with a metal slide plate 84, and one side wall of the metal slide plate 84 is connected to the support plate 81 by a rubber limit spring 86, and the other side wall of the metal slide plate 84 is connected by a rubber spring 85 Connected to the clamping wall; the support plate 81, the support column 82 and the clamping arm 83 are all set to rubber materials; during work, when the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More