Robot fish bionic control method and system integrating Spiking neural network and CPG
A neural network and control method technology, applied in the field of motion control, can solve the problems of environmental adaptability of robotic fish, the difficulty of integrating model and environmental information, etc., to achieve the effect of improving autonomy and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
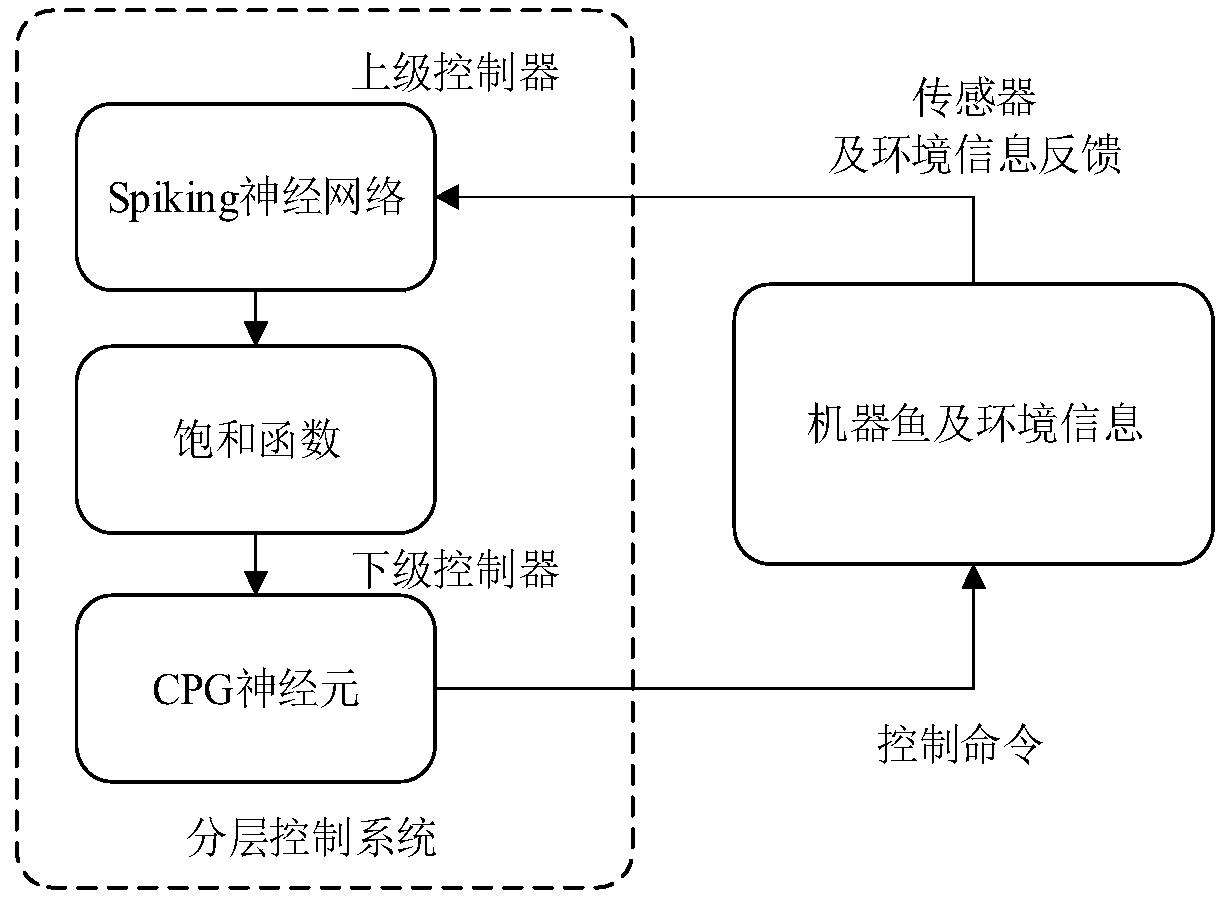
[0045]This embodiment discloses a bionic control method for robotic fish that integrates Spiking neural network and CPG, imitating the biological motion mechanism to design the motion control system of robotic fish, and the Spiking neural network is used as an upper-layer controller to process environmental information and generate decision-making commands; The saturation function enables the CPG model to have an input function; the CPG neuron acts as a lower-level controller to receive spiking excitation signals and output control commands. This disclosure proposes the possibility of a robotic fish underwater sensing environment and autonomous movement.
[0046] Step 1: Spiking neural network modeling
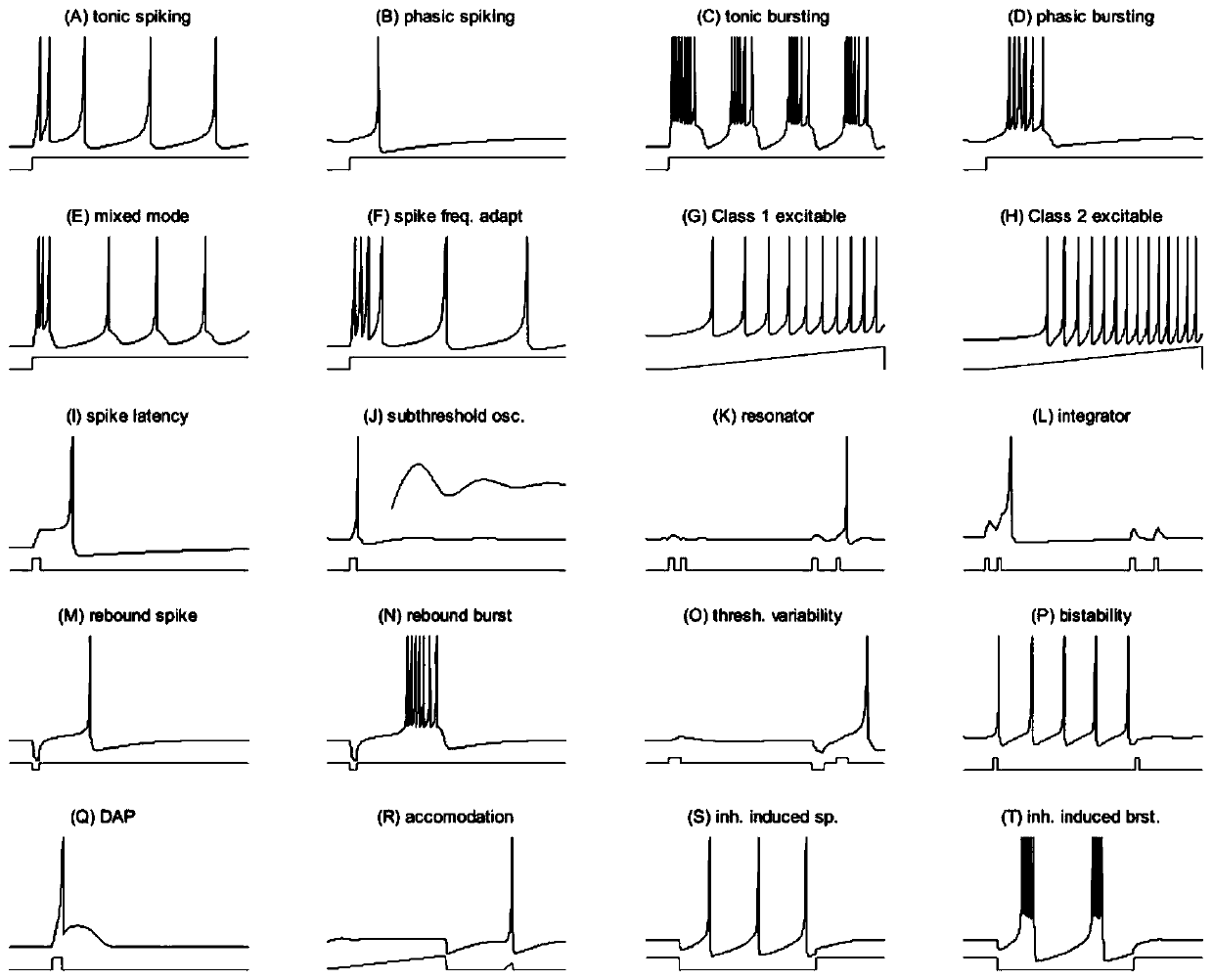
[0047] Neurons are the basic structural components of the brain and the most basic unit of the Spiking neural network, which mainly processes pulse signals. This disclosure uses the Izhikevich neuron model as the upper controller of the hierarchical control system, which has s...
Embodiment 2
[0087] The present disclosure provides a robotic fish bionic control system that integrates Spiking neural network and CPG, including:
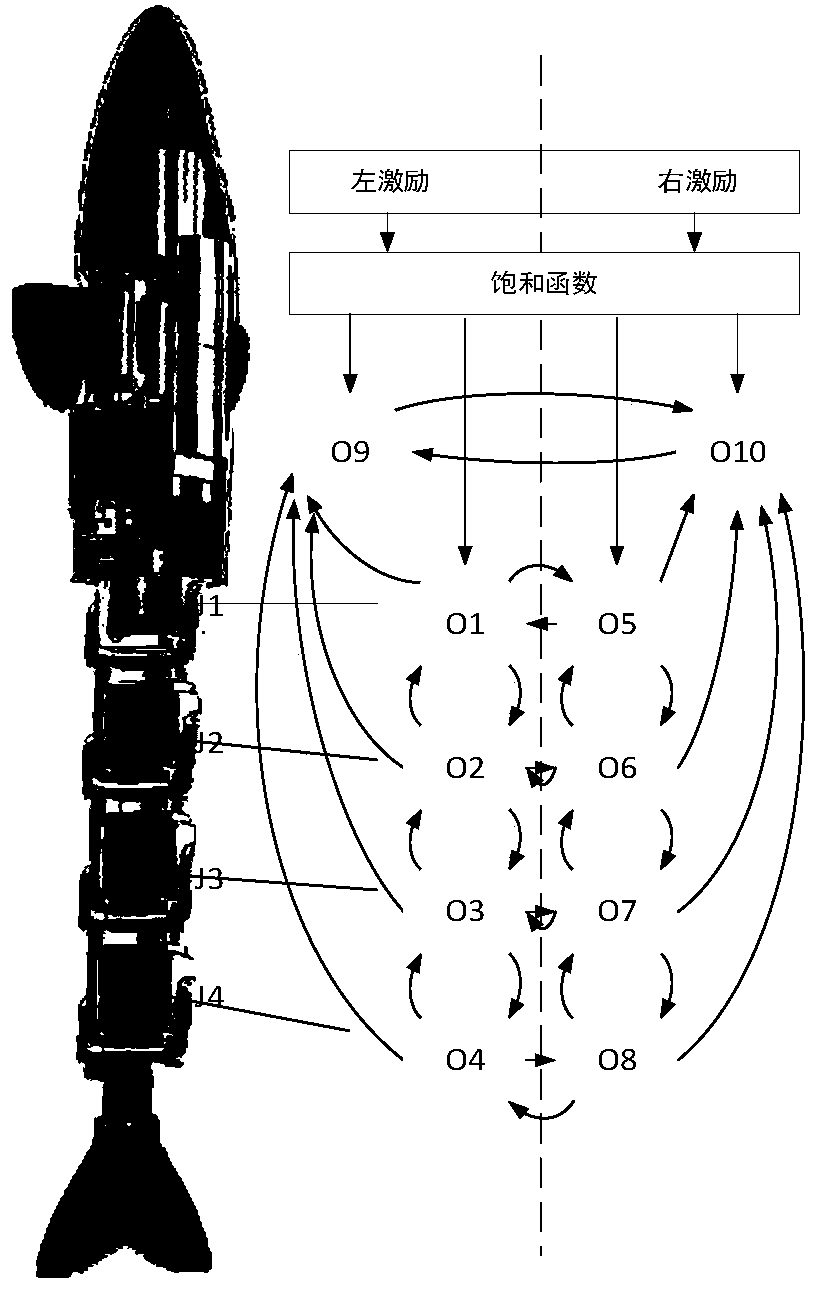
[0088]CPG model building module, which is used for dynamic modeling of four-joint robot fish with pectoral fins, using nonlinear oscillator model as CPG neuron, to determine the left and right input excitation, downlink and uplink phase coupling coefficient, and uplink and downlink coupling The coefficient weight corresponds to the CPG frequency of each joint;
[0089] Spiking neural network model building module, which is used to determine the Izhikevich neuron model, set various parameters to simulate different discharge states, use the unsupervised algorithm based on Hebb learning rules to perform neural network training on different discharge states, and send the trained data To the CPG neuron, as the input signal of the CPG neuron, drive the CPG to output the control signal of the bionic robot fish;
[0090] Spiking neural network and C...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More