

Vibration reduction method of single-connecting-rod flexible mechanical arm
A technology of flexible manipulators and manipulators, applied in the field of mechanical vibration and vibration control of flexible manipulators, can solve problems such as structural changes, controlled objects or process mathematical models that are difficult to determine
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
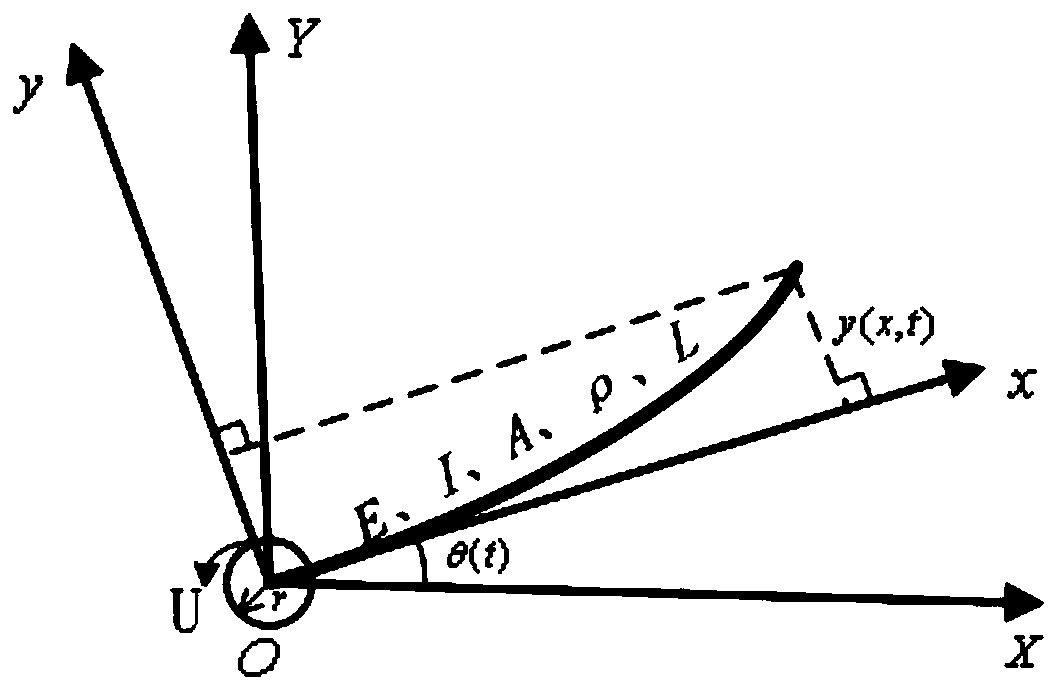
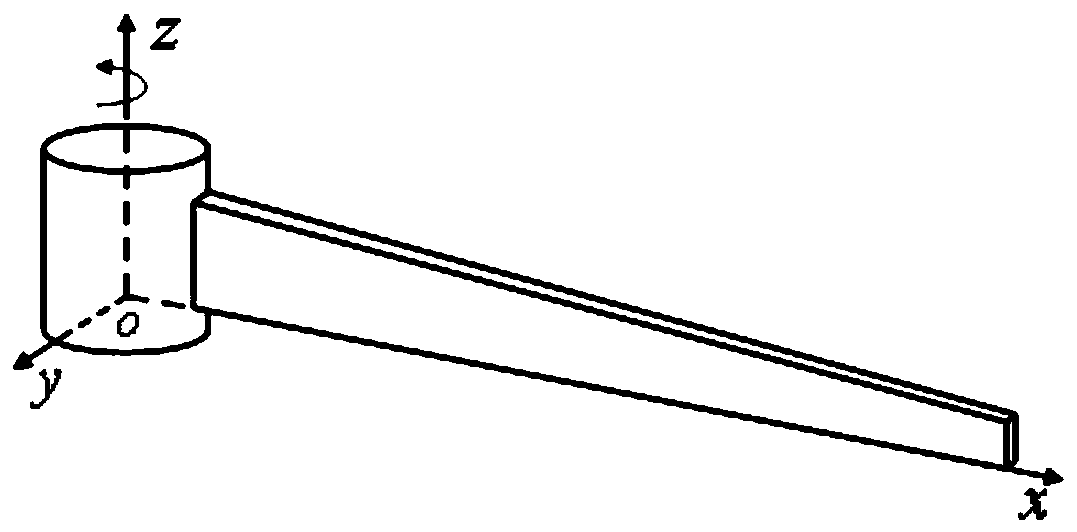
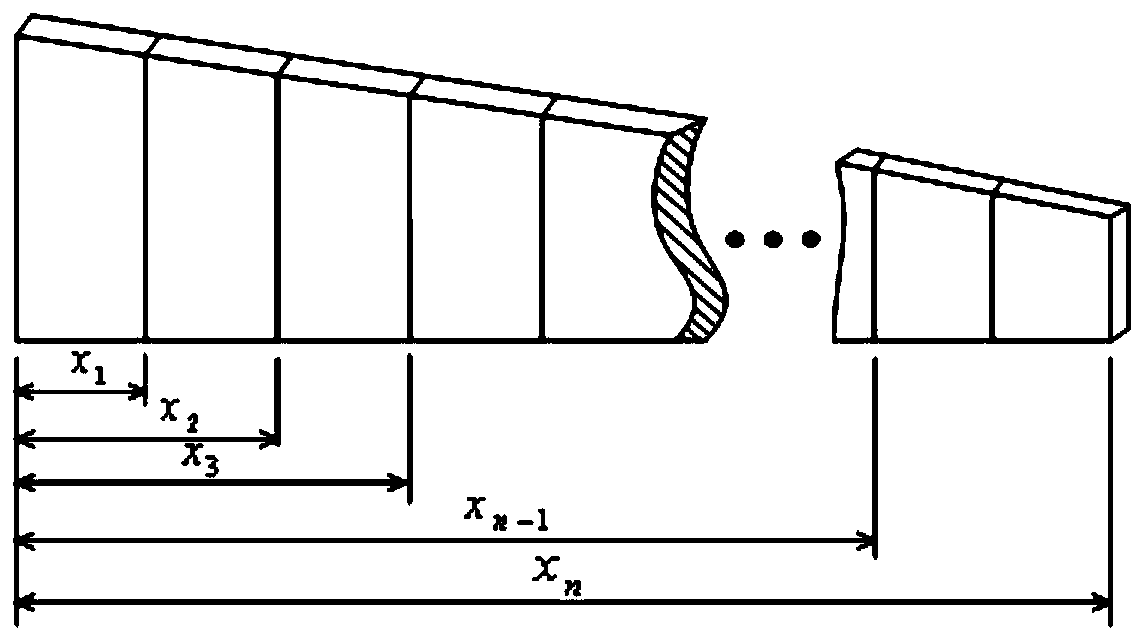
[0092] The present invention is further described below in conjunction with accompanying drawing:
[0093] see Figure 1 to Figure 10 , the present invention provides a vibration reduction method for a single-link flexible manipulator, in a generalized coordinate system, the bending vibration equation is established based on the Euler-Bernoulli beam theory. The parameters are discretized by finite segments, and the dynamic model of the flexible manipulator is established by using the Lagrangian equation. Analyze the dynamic model to obtain the characteristic parameters such as the natural vibration frequency of the manipulator. Set the movement of the manipulator as a three-stage movement of acceleration, uniform speed and deceleration, design the current signal time of the control motor in different motion stages according to the natural frequency of the manipulator, plan the movement trajectory and prepare the movement parameters of the flexible manipulator, and realize Pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More