

Industrial robot for product appearance detection based on visual system
An industrial robot and appearance inspection technology, applied in the field of vision systems, can solve the problems of inability to detect from multiple angles, troublesome use, inability to achieve energy saving and environmental protection effects, etc., and achieve the effect of convenient operation and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
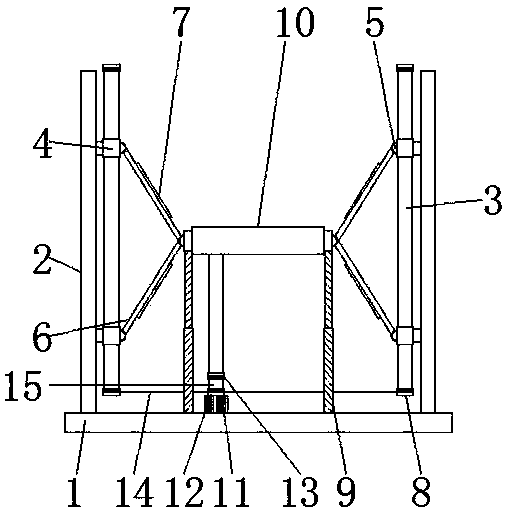
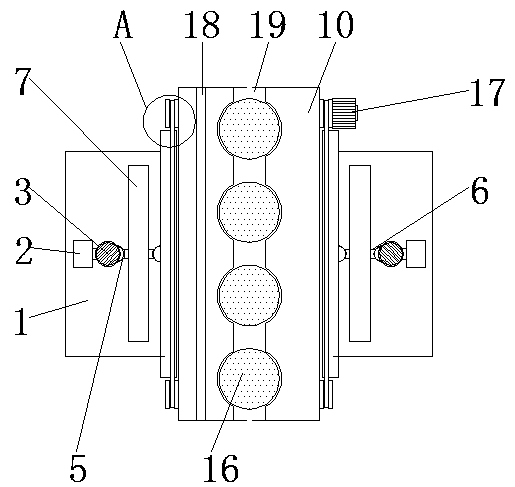
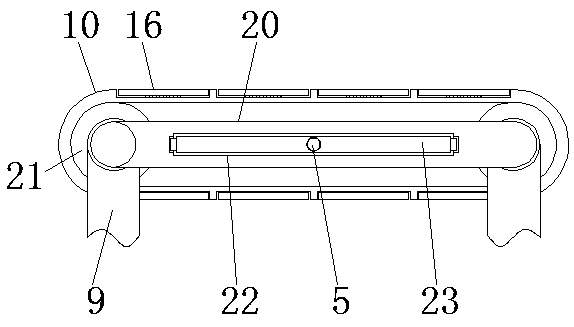
[0030] see Figure 1-9 , the present invention provides a technical solution: an industrial robot for product appearance inspection based on a vision system, including a base 1, a support column 2, a reciprocating screw rod 3, a rotating sleeve 4, a connecting shaft 5, a moving rod 6, and a mounting plate 7. Rotary disk 8, support rod 9, conveyor belt 10, first motor 11, first driving disk 12, first ratchet 1201, second driving disk 13, second ratchet 1301, be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More