

Robot intelligent grabbing method based on virtual training
A technology of robot intelligence and virtual training, applied to instruments, manipulators, computer components, etc., can solve problems such as poor performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The specific implementation of the present invention will be further described below in conjunction with examples and accompanying drawings, but the embodiments of the present invention are not limited thereto.
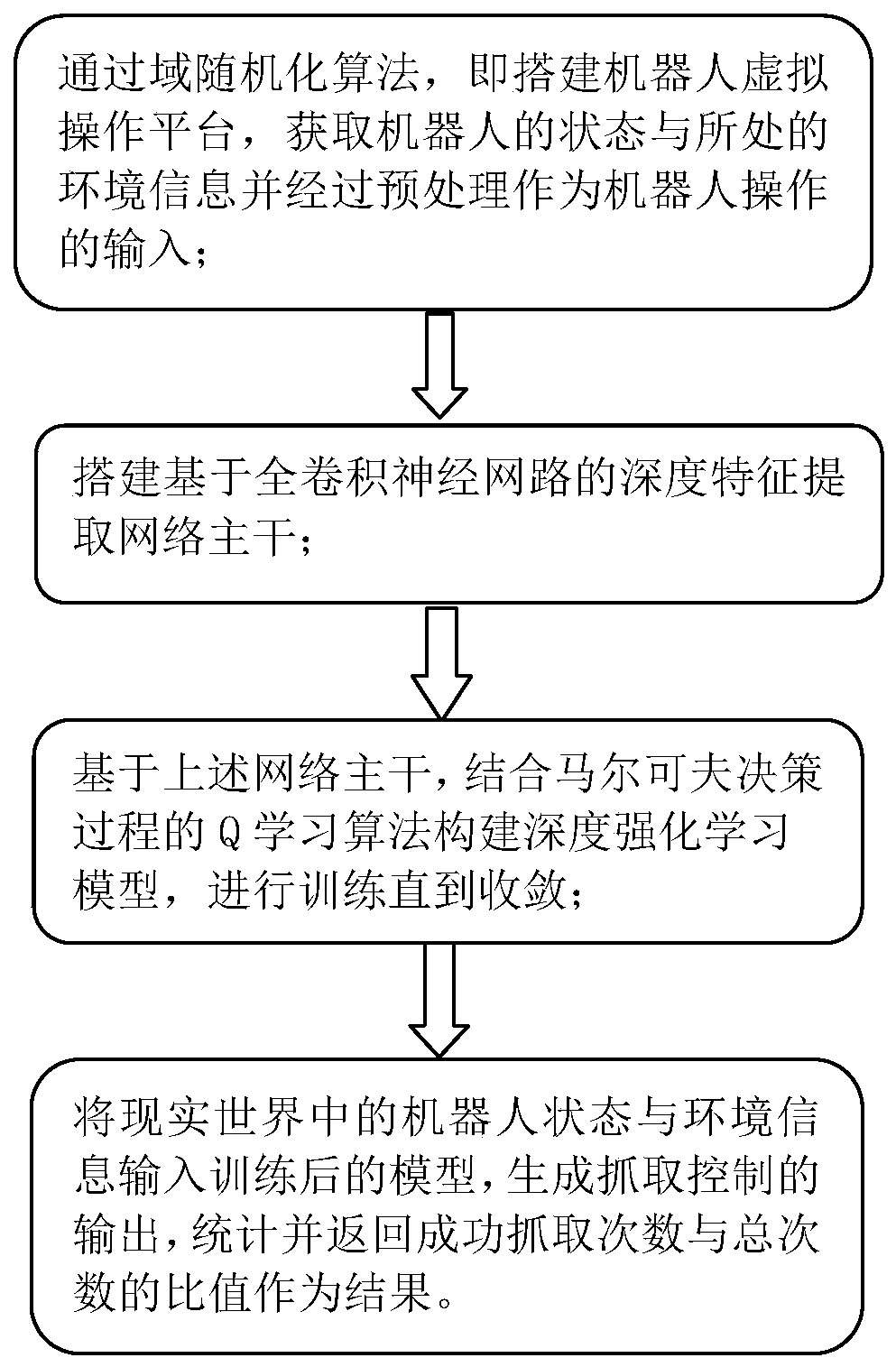
[0089] A robot intelligent grasping method based on virtual training, such as figure 1 shown, including the following steps:
[0090] S1. Build a robot virtual operation platform and randomize it with a domain randomization algorithm, obtain the state and environment information of the robot and preprocess it as the input of the robot operation, and construct the input data for training the robot to grasp the operation; including The following steps:
[0091] S1.1. Build a robot virtual operation platform and randomize it using a domain randomization algorithm. The purpose is to provide enough variability in the sample space of the simulated scene during training, so that the model can be extended to the real world during testing. data; domain randomization u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More