

Steel plant sewage discharge monitoring method and system based on unmanned aerial vehicle
A sewage discharge and unmanned aerial vehicle technology, applied in the field of environmental monitoring, can solve the problems of inability to realize all-weather monitoring, high cost of remote sensing technology, impact of remote sensing monitoring, etc., to achieve easy long-term uninterrupted work, reduce manpower and material resources, and achieve good development potential effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
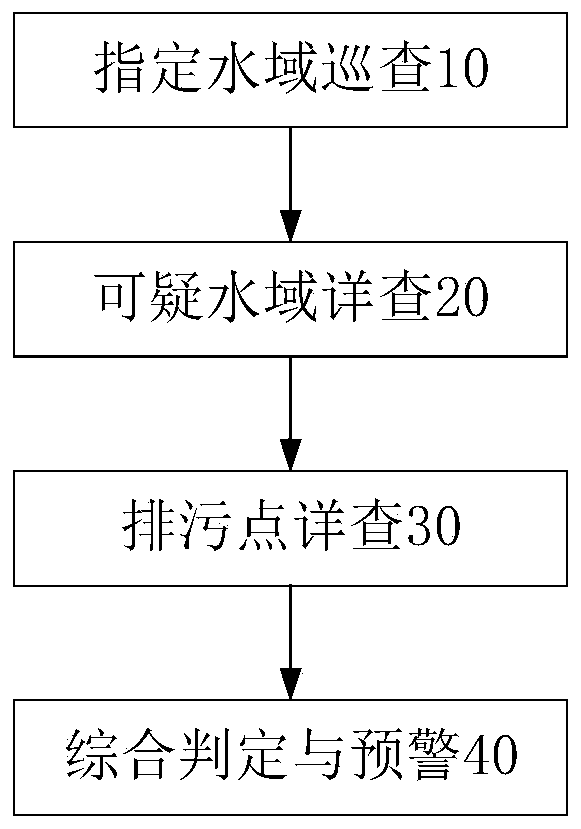
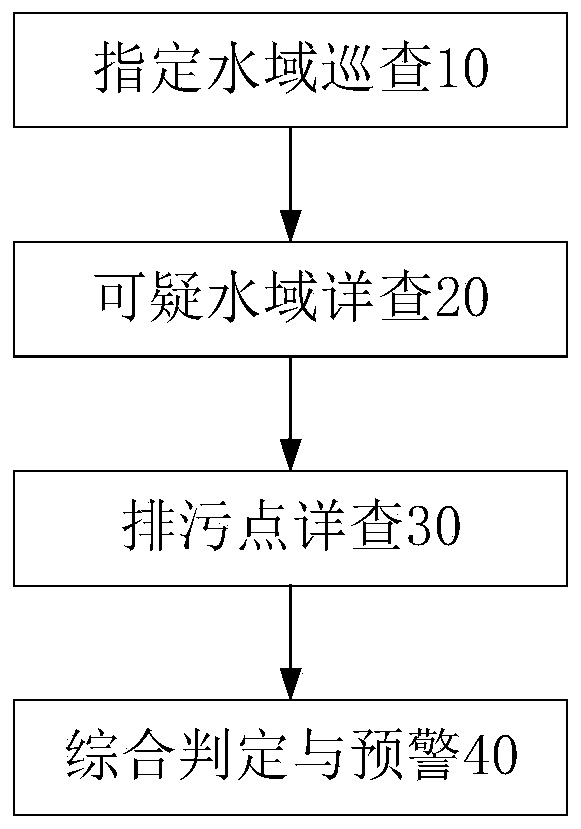
[0025] Such as figure 1 Shown, the present invention is based on the unmanned aerial vehicle sewage discharge monitoring method of iron and steel plant, comprises the following steps:
[0026] (10) Inspection of designated waters: the multi-rotor UAV flies according to the planned route, collects millimeter-wave radiation data and location information of waters along the way, and the ground control center monitors abnormal signals to determine the location of suspicious sewage areas;
[0027] In the step (10) of patrolling designated waters, the 8mm band millimeter-wave radiometer carried by the drone is used to passively receive electromagnetic radiation from the water body along the route, and collect millimeter-wave radiation data along the route.
[0028] (20) Detailed investigation of suspicious waters: conduct a cone scan on suspicious waters to obtain radiation data and location information of the waters, and take optical images of the waters, and determine whether the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More