

Inertia/astronomical integrated navigation method based on residual compensation multi-rate CKF
A technology of integrated navigation and integrated navigation system, applied in the field of inertial/astronomical integrated navigation based on residual compensation multi-rate CKF, which can solve the problems of star sensor output signal delay and low output frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The technical solutions provided by the present invention will be described in detail below in conjunction with specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and not to limit the scope of the present invention.
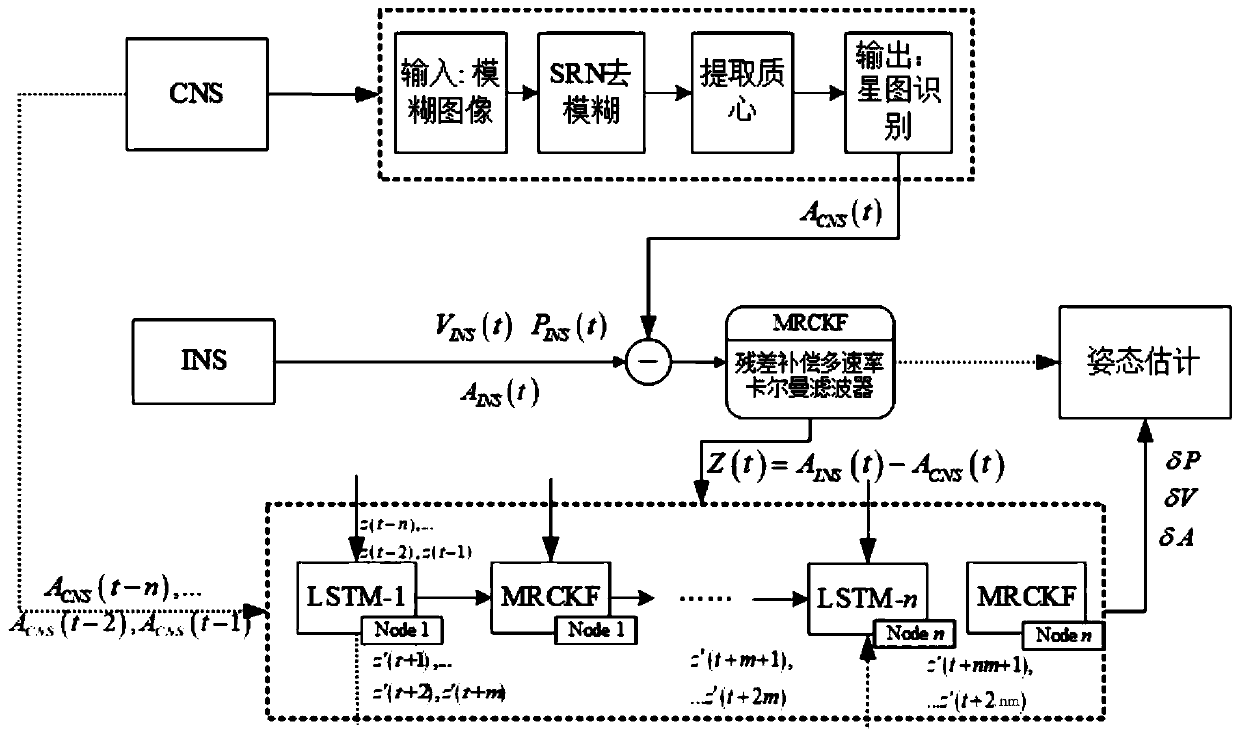
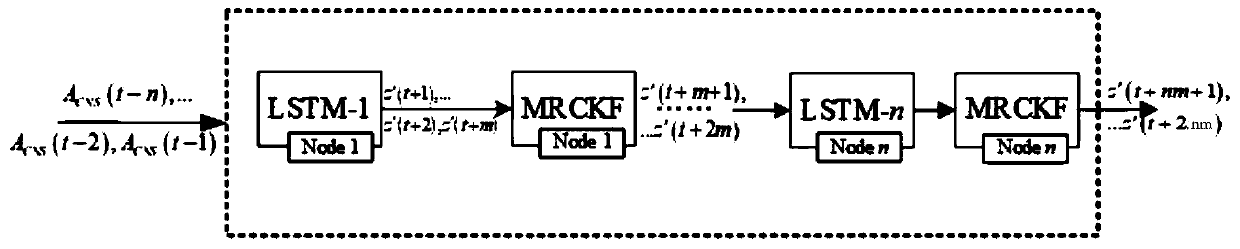
[0095] The present invention introduces two types of deep learning mechanisms in the INS / CNS combined system: multi-scale regression (Scale-Recurrent Network, SRN) and Long Short-TermMemory (LSTM) to star sensor image and output frequency optimization. The SRN network realizes the de-blurring of the "tailing" star map, and improves the accuracy of star map centroid extraction. As the sub-module of the filter, the LSTM network expands the system observations, increases the output frequency of CNS, and makes CNS and INS output at the same frequency. The multi-rate volume Kalman filter based on residual compensation realizes the synchronization between INS and CNS data output o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More