

Free floating target pose prediction method based on hybrid Kalman filtering
A technology of Kalman filter and Kalman filter, which is applied in measuring devices, integrated navigators, surveying and navigation, etc., can solve the problems of large amount of calculation, large error of results, and inability to make full use of historical observation data, etc., to achieve real-time estimation , The process is simple and convenient, and the calculation speed is fast
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be described in further detail below in conjunction with the accompanying drawings.
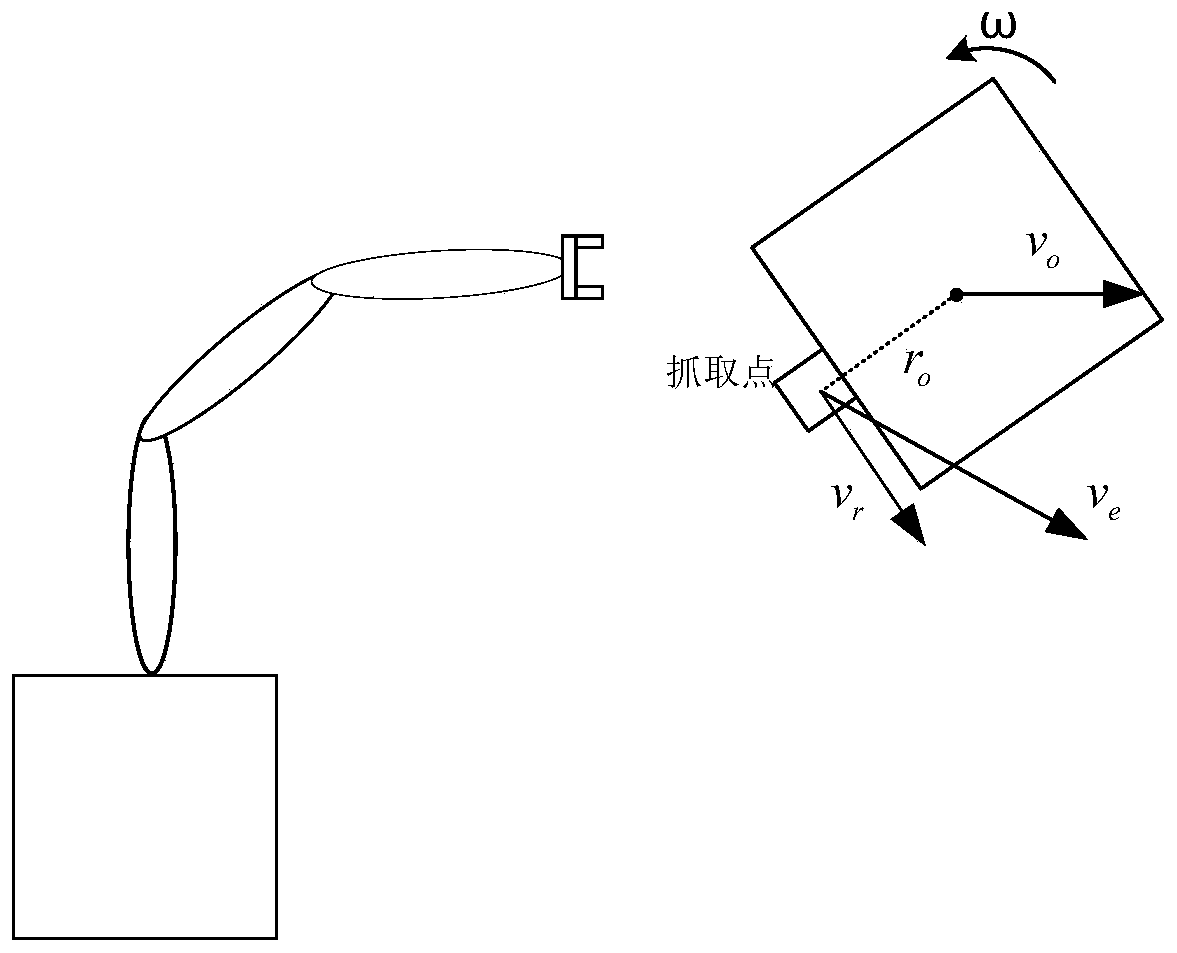
[0058] Such as image 3 In the grasping scene shown, the target is in a floating state without any external force, and moves at a constant angular velocity and linear velocity. The pose of the grasping point can be fed back in real time through the camera, and the hybrid Kalman filter is used to estimate the entire Motion information and inertial parameters of floating targets.
[0059] Suppose the pose of the grabbing point obtained by the camera is: p=[x,y,z], φ(e,θ)
[0060] The Euler kinetic equation of the target is:
[0061]
[0062]Select state observations as
[0063] X=[q T ω T I T ] T
[0064]
[0065] where Ω(ω) is the transformation matrix of the quaternion, and
[0066] The state equation of the system can be expressed as:
[0067]
[0068] At this time, the Jacobian matrix of the state equation can be expressed as:
[006...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More