

Weeding and obstacle-avoiding robot
A robot and obstacle avoidance technology, applied in the direction of instruments, motor vehicles, land preparation machinery, etc., can solve the problems of manual removal, low level of intelligence, poor operator comfort, etc., to achieve the effect of avoiding injuries and large operating space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the above-mentioned purposes, features and advantages of the present invention more obvious and understandable, the following in conjunction with the attached Figure 1-12 Specific embodiments of the present invention are described in detail.
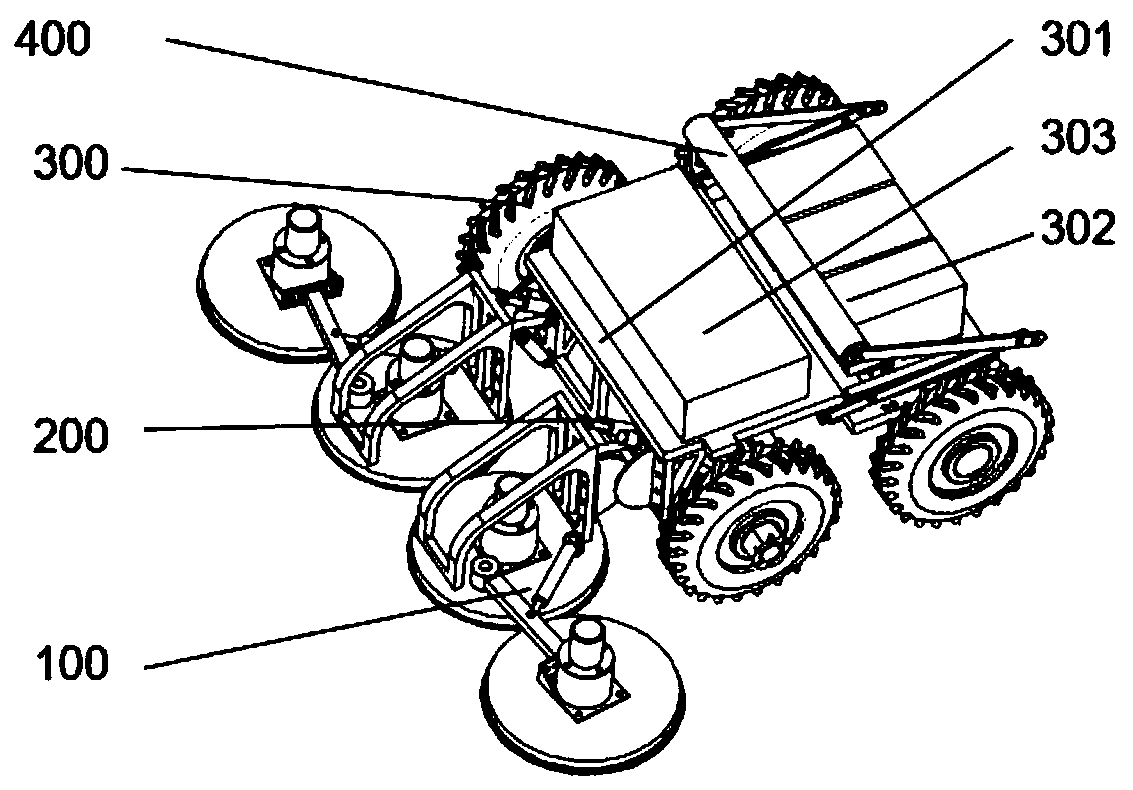
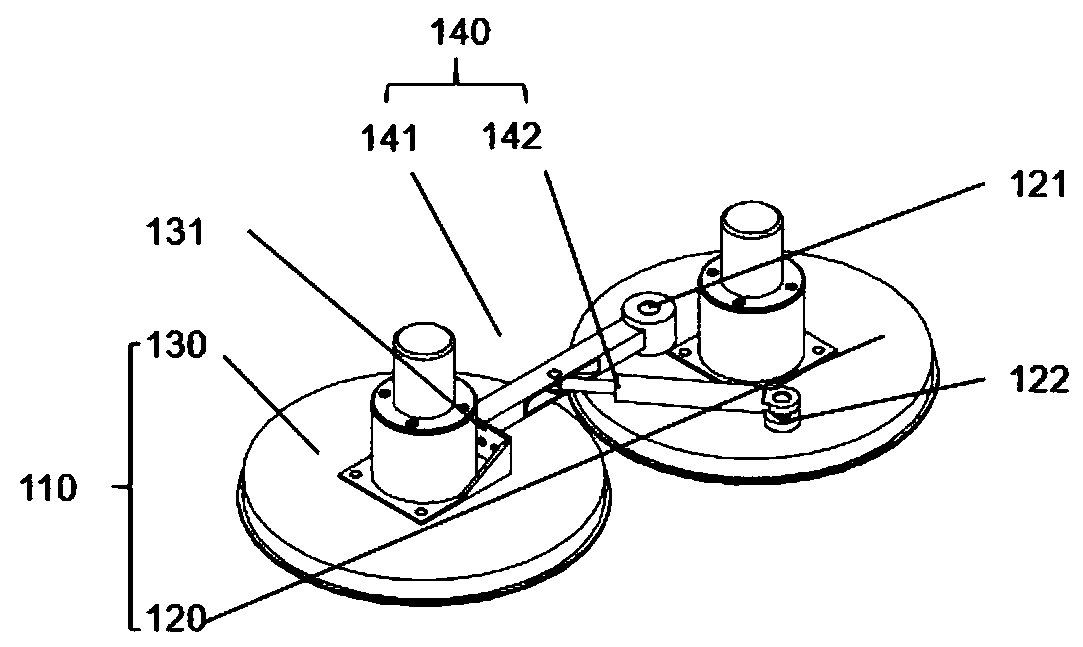
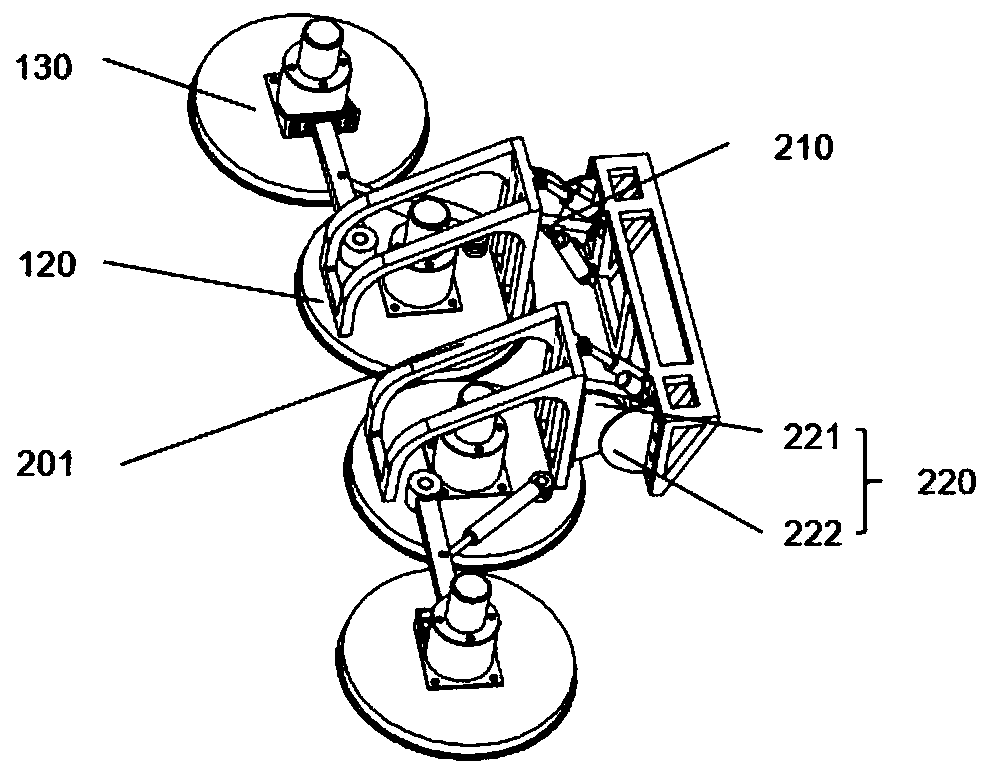
[0048] See attached figure 1 , the first aspect of the present invention provides a weeding and obstacle avoidance robot, including a weeding and obstacle avoidance mechanism 100, a cutter head adjustment mechanism 200, and a mobile platform 300; the cutter head adjustment mechanism 200 is used to adjust the height and / or inclination of the cutter head Angle; one end of the cutter head adjustment mechanism 200 is connected to the weeding and obstacle avoidance mechanism 100 , and the other end of the cutter head adjustment mechanism 200 is connected to the mobile platform 300 .
[0049] Therefore, the present invention can effectively avoid obstacles while automatically weeding by setting the weeding and obstacl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More