

Ground extraction method based on laser radar point cloud characteristic line and plane calibration
A technology of laser radar and extraction method, applied in the field of vehicle laser scanning, can solve the problems of large amount of data, time-consuming, error, long point cloud data level, etc., to achieve the effect of shortening time-consuming, reducing horizontal error, and improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
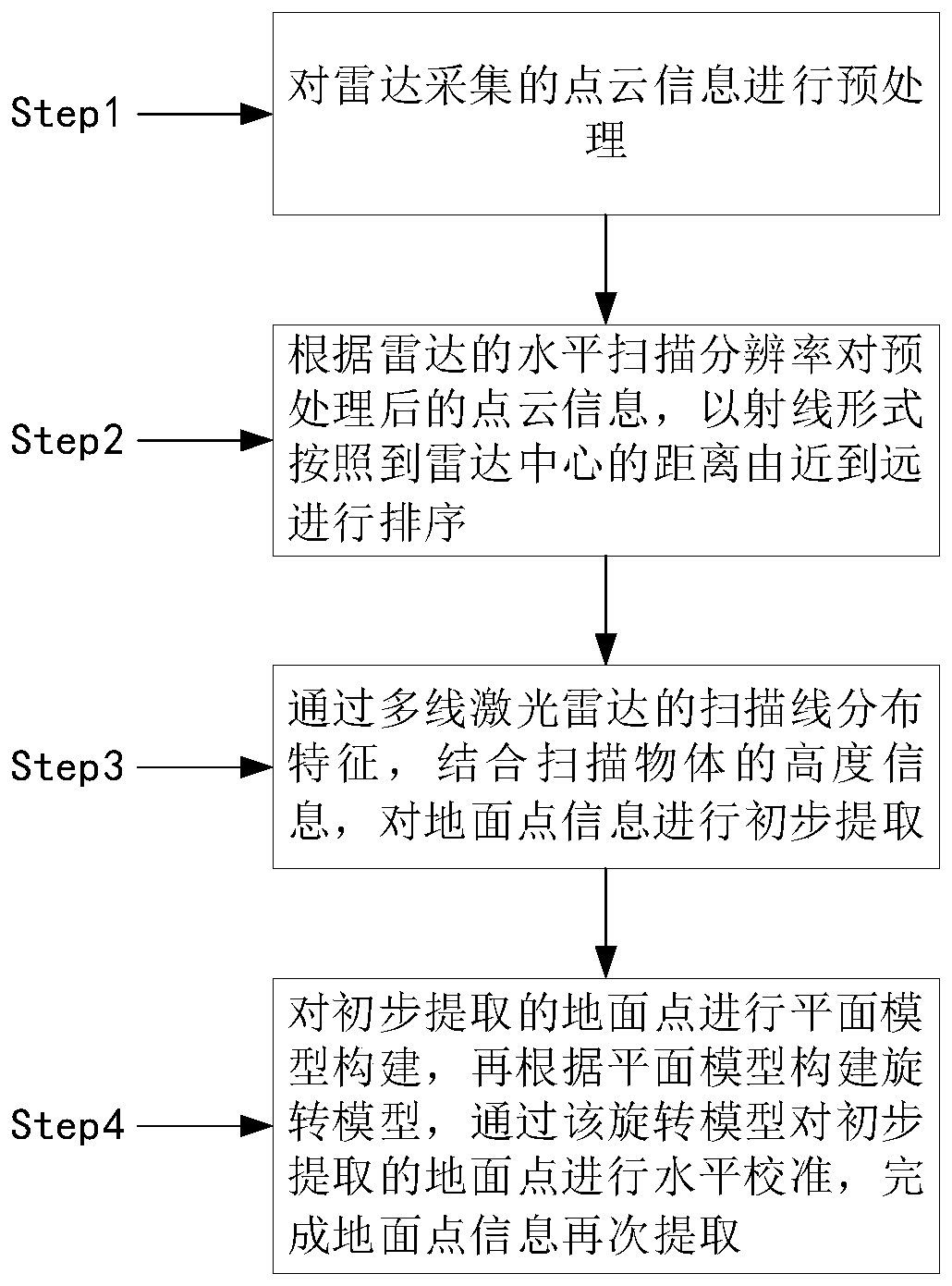
[0058] figure 1 It is a step diagram of the method of the present invention; the present invention proposes a ground extraction method based on laser radar point cloud feature lines and plane calibration, comprising the following steps:
[0059] S1: Preprocess the point cloud information collected by the radar, and use the point cloud downsampling method to compress the point cloud to reduce the calculation time and algorithm complexity;
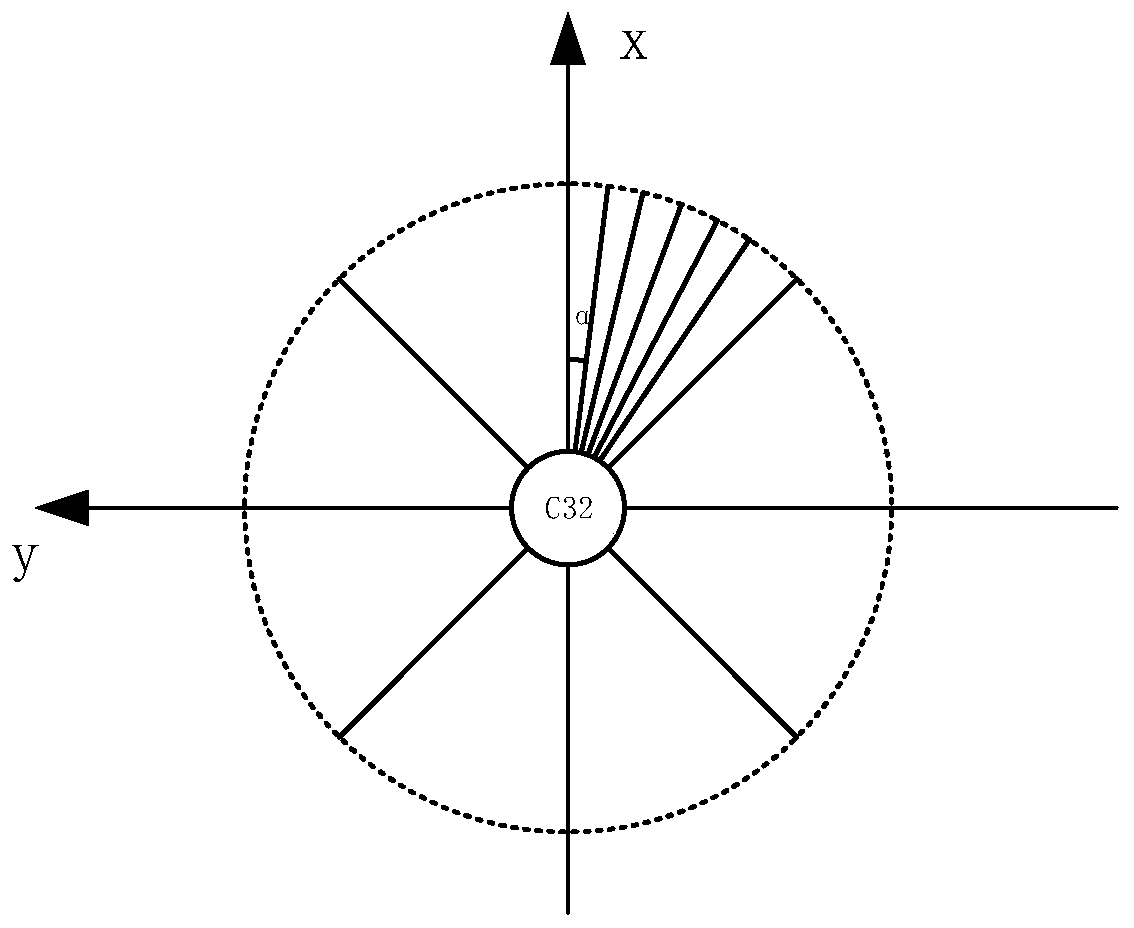
[0060] S2: According to the horizontal scan resolution of the radar, the preprocessed point cloud information is sorted according to the distance to the radar center from near to far in the form of rays, and the azimuth information is assigned to each poin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More