

Decoupling control method for precise compensation of radial force of bearingless permanent magnet synchronous motor
A permanent magnet synchronous motor, decoupling control technology, applied in motor generator control, AC motor control, electronic commutation motor control and other directions, can solve problems such as nonlinear coupling, avoid coordinate transformation, improve control accuracy and dynamic Response speed, the effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the content of the present invention more obvious and understandable, the present invention will be described in detail below in conjunction with specific embodiments.
[0030] Core idea of the present invention:
[0031] (1) There is a strong nonlinear coupling between the displacement of the rotor of the bearingless permanent magnet synchronous motor in the α and β directions. If the compensation and decoupling of the eccentric force are not used in the control, the overall dynamic and static control of the system will be reduced. performance. The traditional linear eccentric force compensation method ignores the nonlinearity of coupling between x and y displacements and the change of motor system parameters, so the improvement of the control performance of the suspension subsystem is limited.
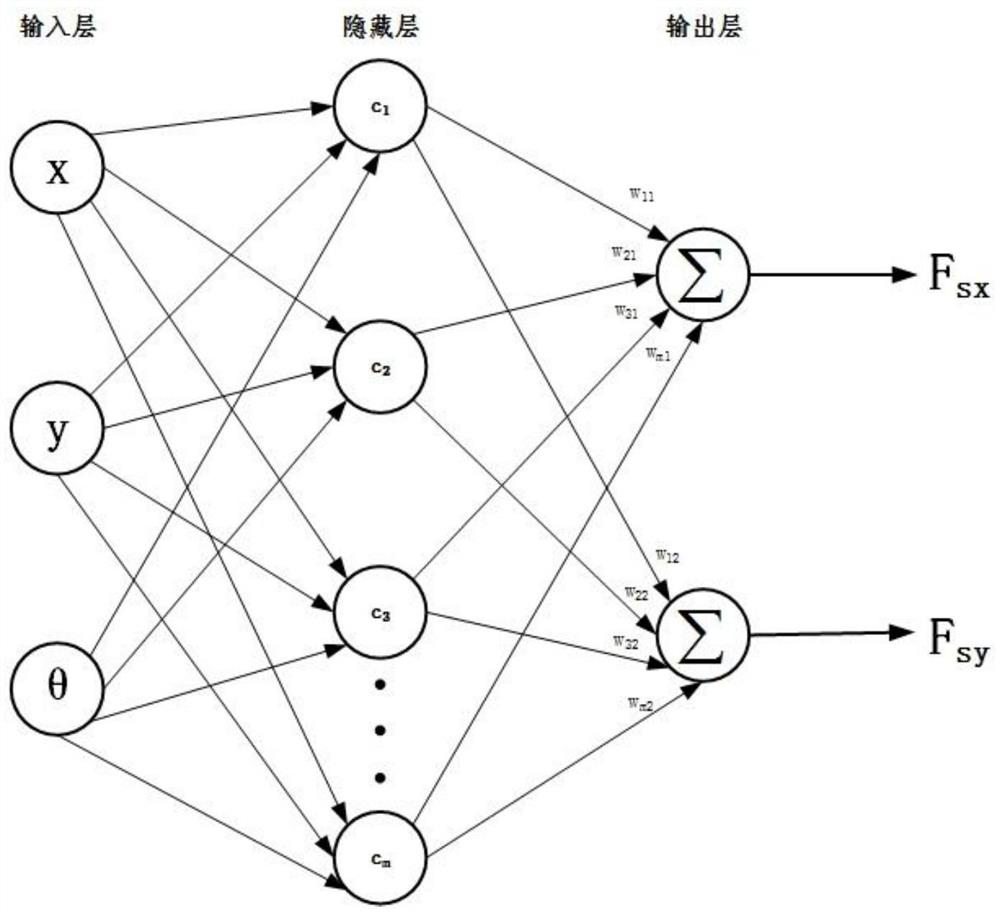
[0032] (2) The RBF neural network can approximate any continuous system with arbitrary precision. The RBF neural network system obtained through offline tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More