

Intelligent vehicle trajectory planning and tracking combined control method
A technology of intelligent vehicle and joint control, applied in vehicle position/route/height control, target finding control, two-dimensional position/course control, etc., can solve the problem of difficult to maintain driving stability, no way to consider steering stability tires Adhesion, inability to consider vehicle dynamics, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0095] In order to make the purpose, technical solutions and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and implementation examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
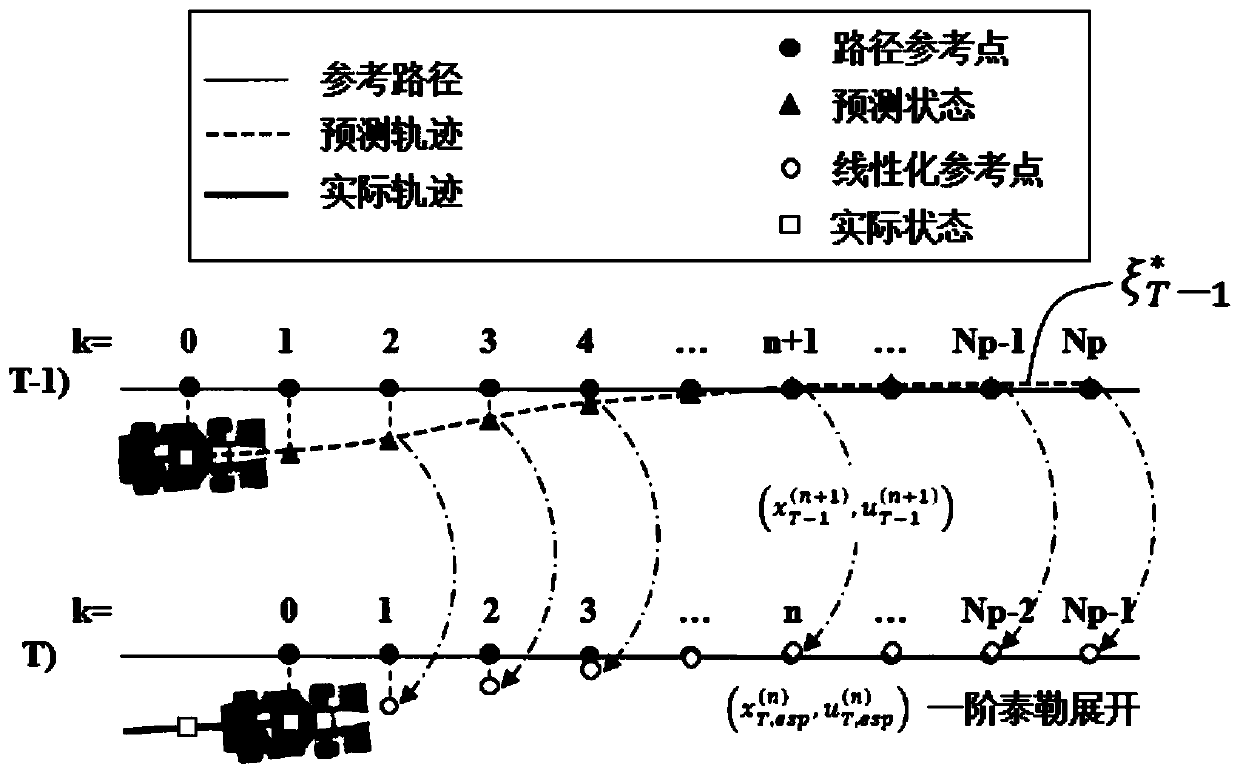
[0096] For the convenience of expression, assume that the current time is T time, and the time information is represented by the state variable ξ and the right subscript of the solution U. The control period of the model predictive control method is Ts, and the prediction time domain (step size) is Np, that is, the number of predictive control steps k∈[1,N p ].
[0097] A joint control method of intelligent vehicle trajectory planning and tracking can be used in extreme cases. This method can be applied to ordinary four-wheel vehicles with front-wheel steering; for example, when it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More