

Four-wheel independent drive automobile stability control method based on model prediction algorithm
A four-wheel independent drive, stability control technology, applied in the field of automotive stability control, can solve problems such as insufficient supply, less active safety control, and inability to provide steering centripetal force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0049] see Figure 7 , Figure 7 The present invention provides a schematic flow chart of a method for controlling the stability of a four-wheel independent drive vehicle based on a model prediction algorithm. Specifically, the method for controlling the stability of a four-wheel independent drive vehicle based on a model prediction algorithm may include the following steps:
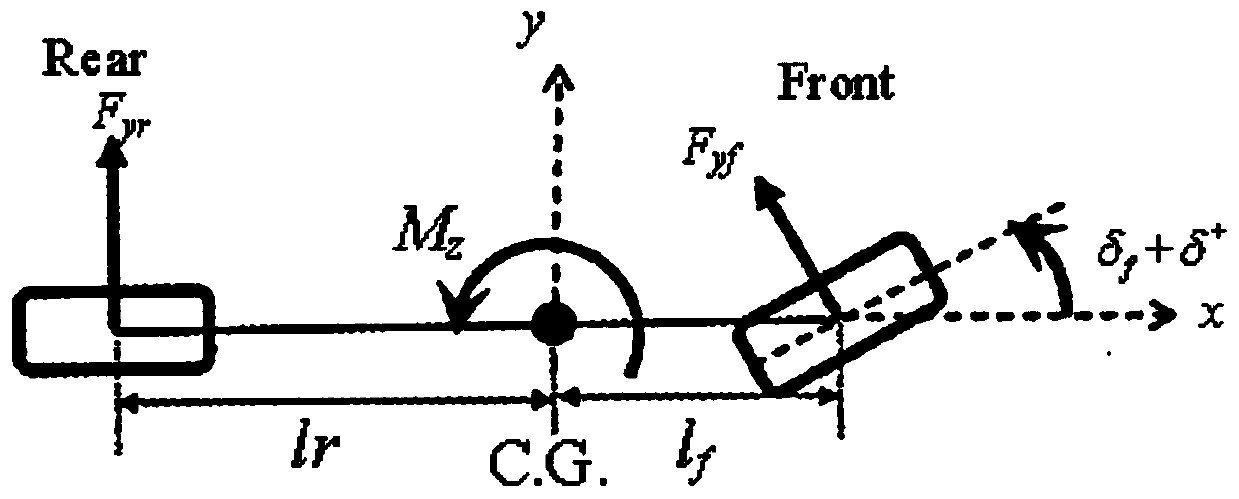
[0050] S101, establishing a vehicle model based on the yaw rate, lateral velocity, and front and rear tire slip angles of the monorail model;
[0051] In...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More