

Automatic body temperature measuring device and method based on collaborative robot
An automatic measurement and robot technology, applied in measurement devices, body temperature measurement, heat measurement, etc., can solve the problems of insufficient body temperature measurement accuracy, low efficiency, and inability to screen fever people with body temperature data, and achieve good industrial practicability, Fast measurement and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
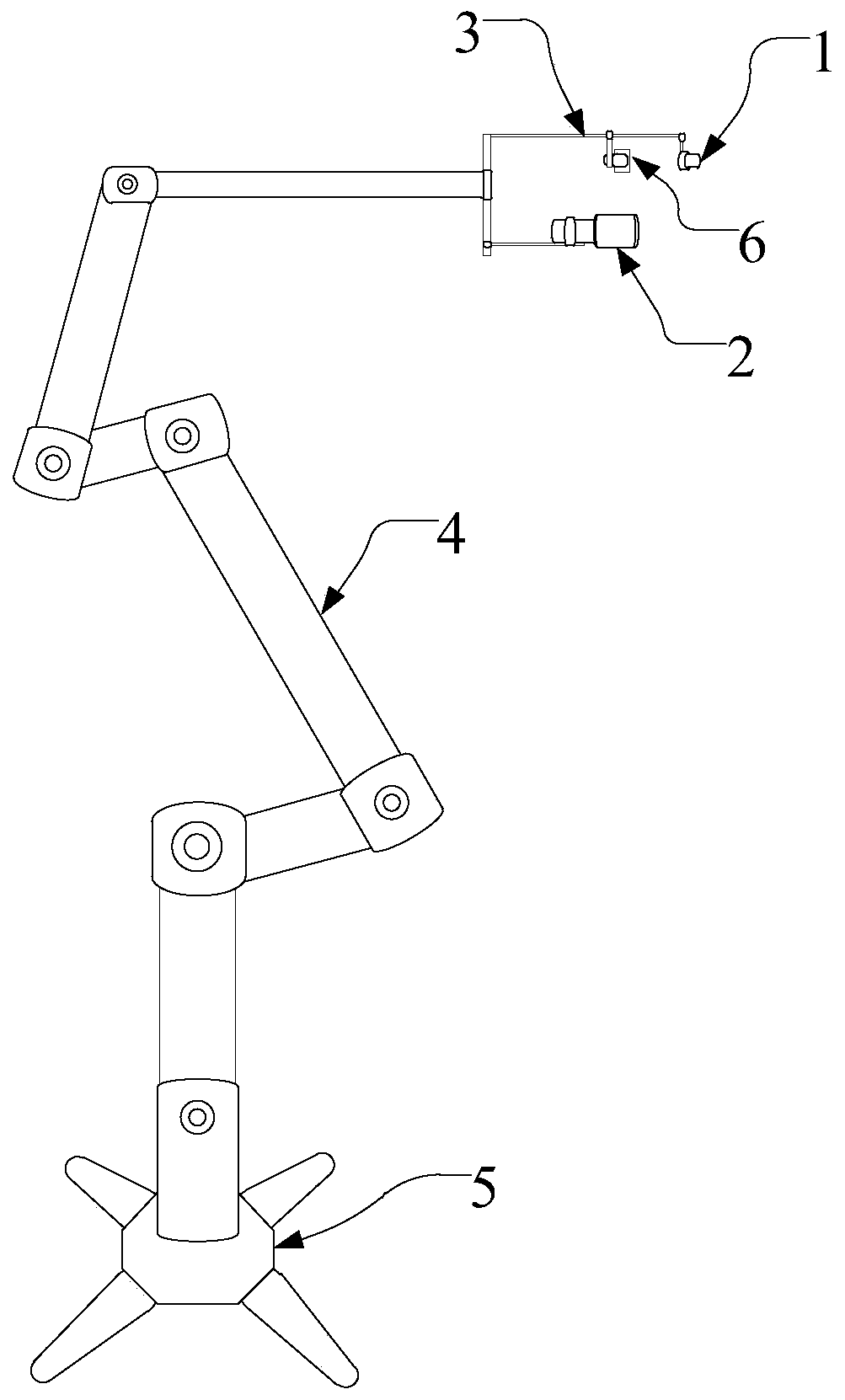
[0064] figure 1 It is a schematic structural diagram of the body temperature automatic measurement device based on the collaborative robot disclosed in Example 1.
[0065]In Embodiment 1, the body temperature automatic measurement device based on the collaborative robot includes a six-axis robot 4, which is installed on the robot base 5; There are two parallel brackets, a forehead thermometer 1 is installed at the right end of the upper parallel bracket, and a first image acquisition component 2 is installed at the right end of the lower parallel bracket.
[0066] On the connecting flange 3 , a second image acquisition component 6 is provided on the left side of the forehead thermometer 1 to acquire the forehead temperature information image measured by the forehead thermometer 1 .
Embodiment 2
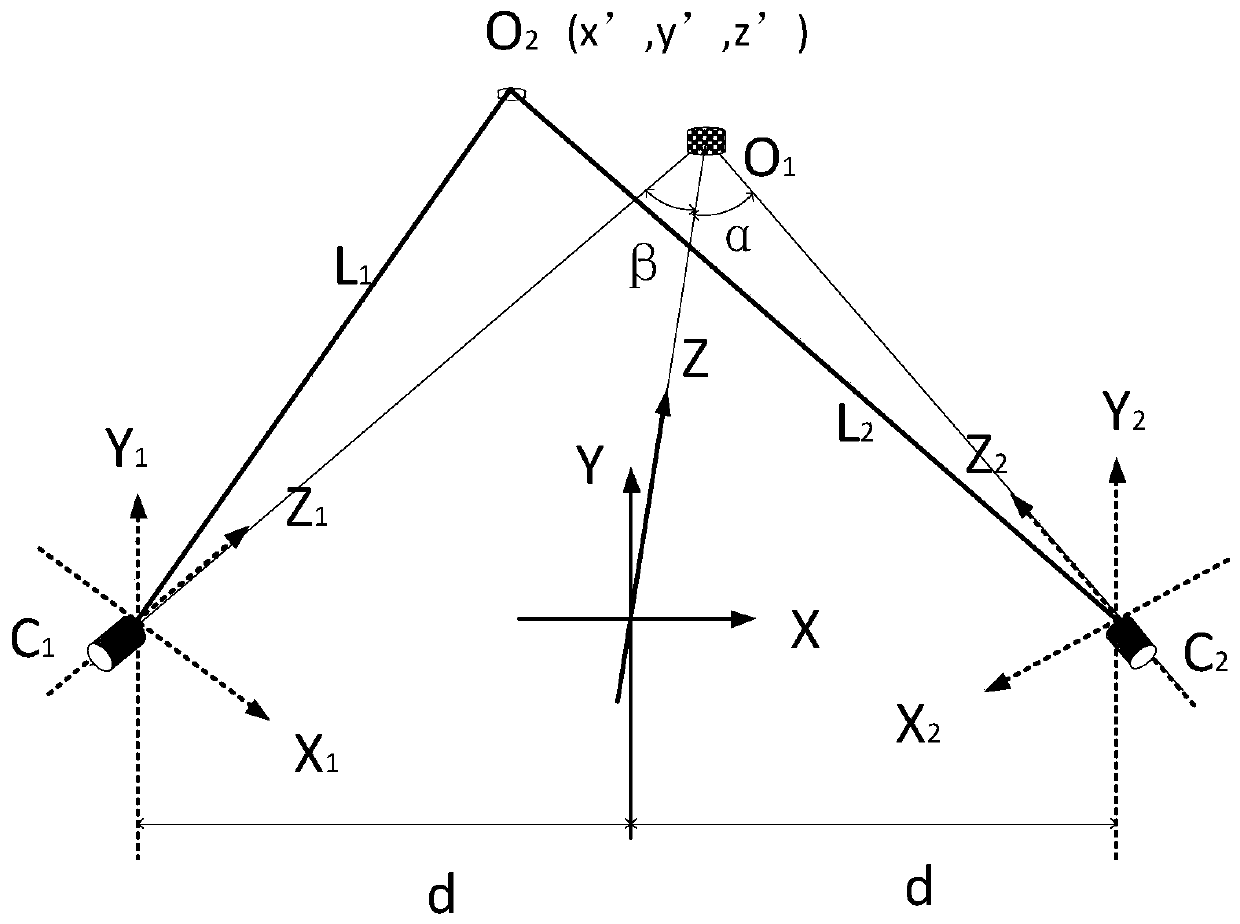
[0068] figure 2 It is a schematic diagram of measuring the coordinates of the target to be measured by the dual cameras in the automatic body temperature measurement device based on the collaborative robot disclosed in Embodiment 2.
[0069] In the body temperature automatic measurement device based on the collaborative robot disclosed in Embodiment 2, the dual cameras perform position measurement by the following method to determine the coordinates of the target person:
[0070] will calibrate the target O 1 set on the first camera C 1 and second camera C 2 Within the range of image acquisition, the first camera C 1 The first coordinate system of (X 1 , Y 1 ,Z 1 ), the second camera C 2 The second coordinate system of (X 2 , Y 2 ,Z 2 ), the two cameras capture the calibration target O from different angles simultaneously 1 Image;
[0071] Through the first camera C 1 and second camera C 2 Internal parameters, such as angle of view, aperture position, and extern...
Embodiment 3
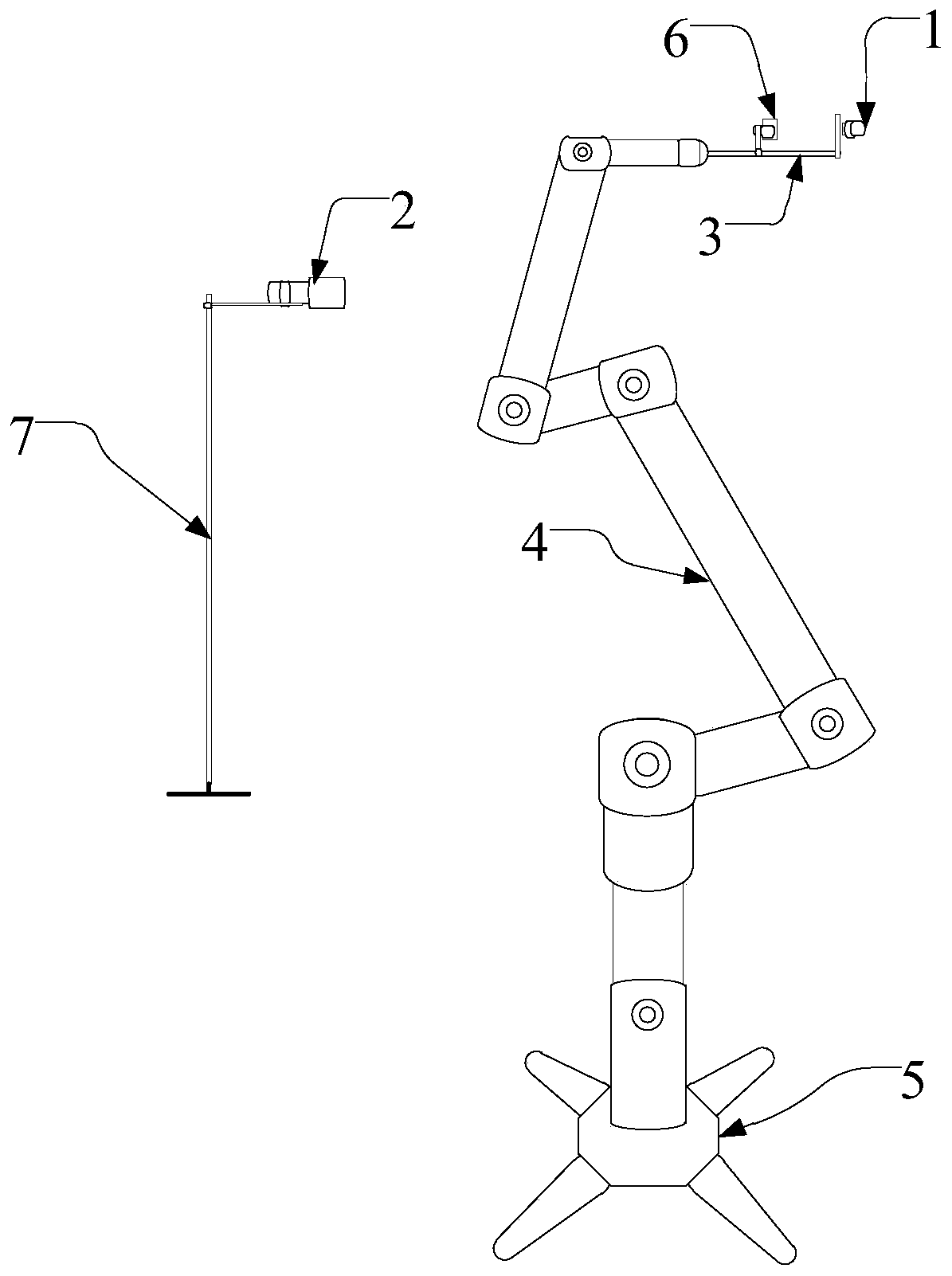
[0076] image 3 It is a schematic structural diagram of the body temperature automatic measurement device based on the collaborative robot disclosed in Embodiment 3.
[0077] In Embodiment 3, the body temperature automatic measurement device based on the collaborative robot includes a six-axis robot 4, which is installed on the robot base 5; the top of the six-axis robot 4 is connected to a connecting flange 3, and the right end of the connecting flange 3 A forehead thermometer 1 is installed, and a second image acquisition component 6 is arranged on the left side of the forehead thermometer 1 to acquire the forehead temperature information image measured by the forehead thermometer 1 .
[0078] The first image acquisition component 2 is arranged on the same side of the six-axis robot 4 and fixed on the camera bracket 7 .
[0079] In the body temperature automatic measurement device based on the collaborative robot disclosed in the embodiment of the present application, the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More