

Method for realizing underground robot path optimization based on membrane calculation
A path optimization and robot technology, applied in computing, instruments, simulators, etc., to achieve the effect of small speed error, improve work efficiency and precision, and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them.
[0054] A method for realizing downhole robot path optimization based on membrane calculation, comprising the following steps:
[0055] S1: Construction of cell-based membrane system for underground robots in coal mines
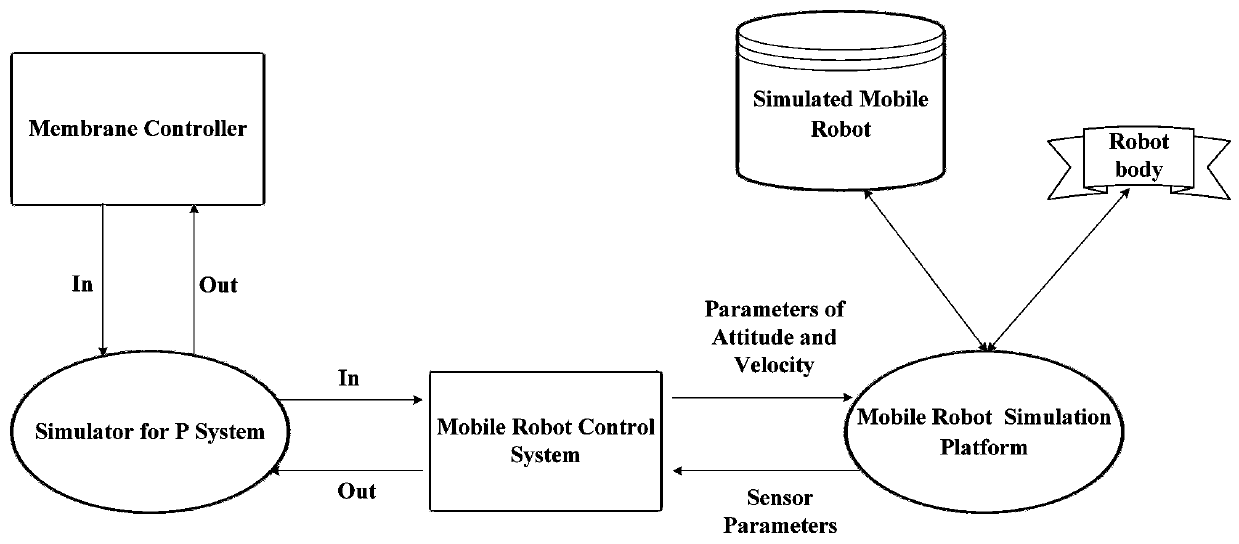
[0056]S1-1: In the cell-type membrane system, the rules run in each membrane, and the data can be processed quickly. Combining the parallel and distributed characteristics of membrane computing, a data processing membrane system that is both independent and cooperative is constructed. Modeling principle and control process framework of underground mobile robot in coal mine using cell-type membrane system, such as figure 1 shown.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More