

Transformer substation inspection robot obstacle detection and recognition method integrated with depth camera
A technology for inspection robots and obstacle detection, applied in character and pattern recognition, instruments, computer components, etc., can solve problems such as low real-time performance, little obstacle information, and safety issues, and achieve rich information acquisition and reduced complexity degree, the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with specific embodiments.
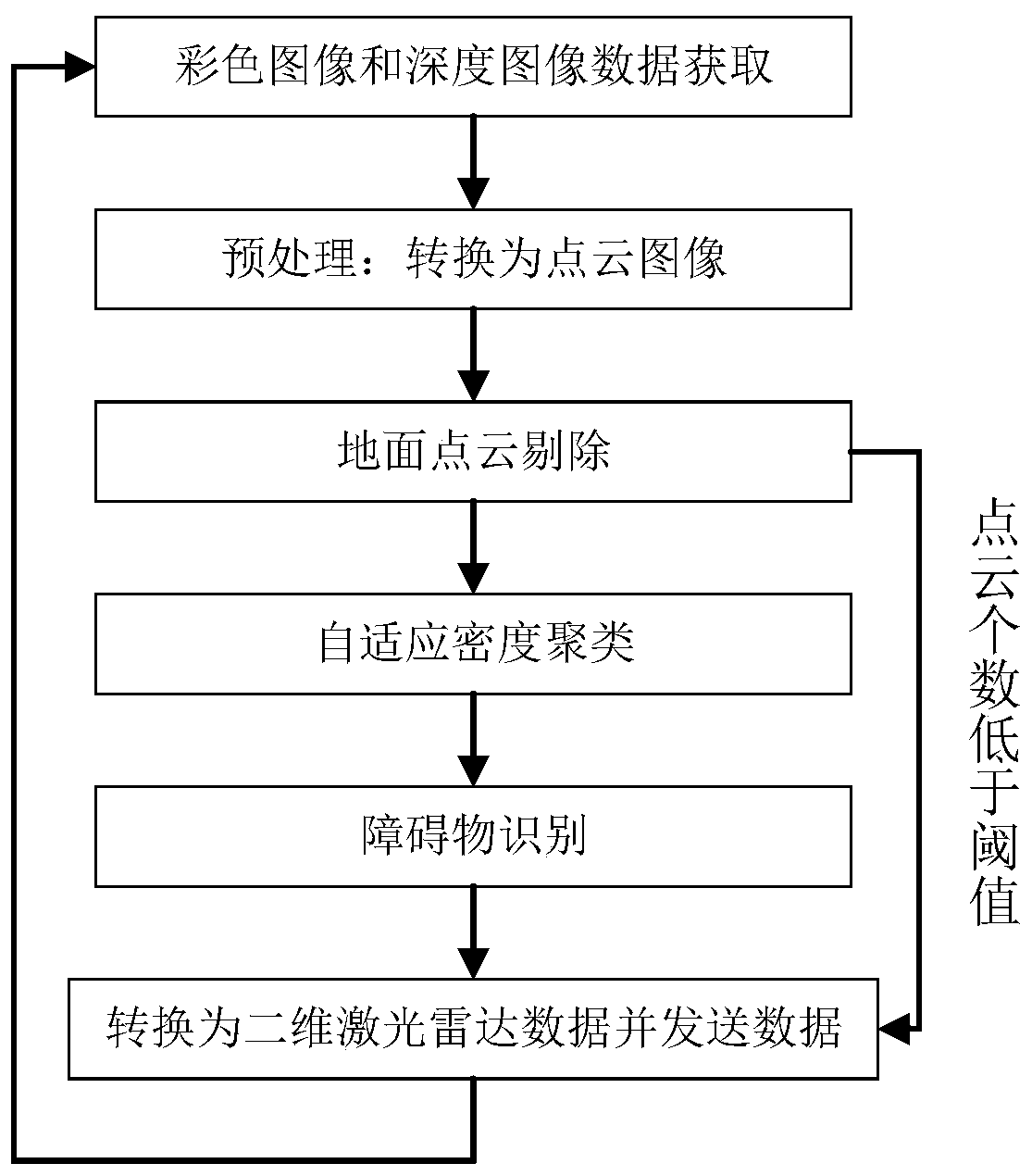
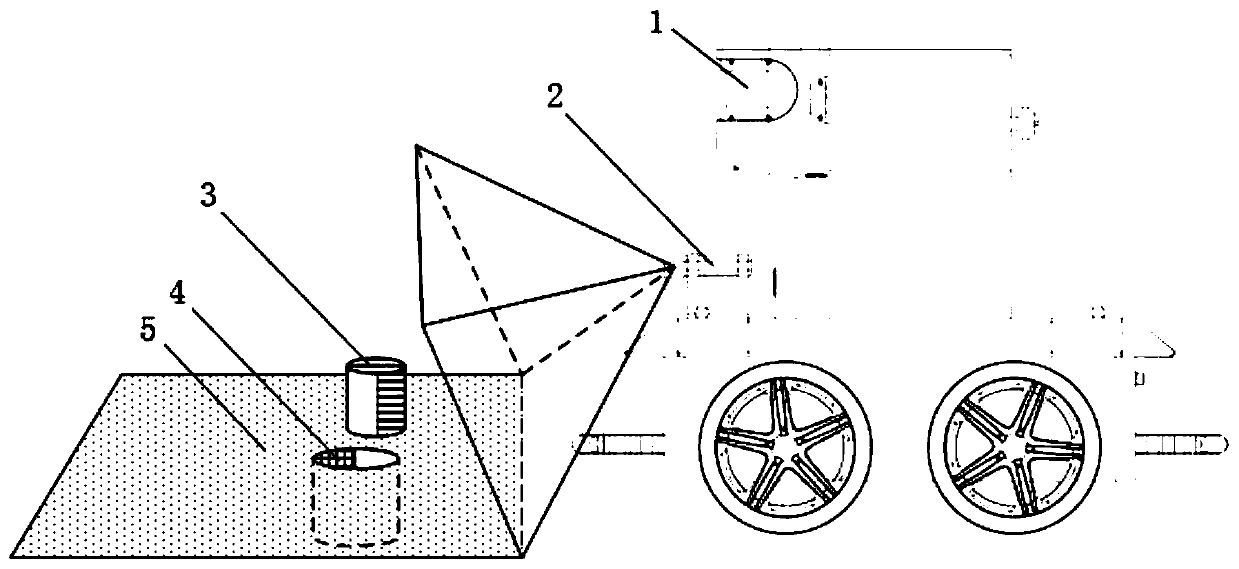
[0036] Such as figure 1 with figure 2 As shown, the obstacle detection and recognition method of the substation inspection robot integrated with the depth camera provided in this embodiment includes five parts: preprocessing, ground point cloud elimination, adaptive density clustering, obstacle recognition and data conversion. This example uses the LMS-511 two-dimensional laser radar launched by the German SICK company, such as figure 2 As shown in the two-dimensional laser radar 1 in the middle, the model of the depth camera is Microsoft's Azure-Kinect camera, such as figure 2 Medium Depth Camera 2 is shown. The specific implementation of each part is introduced below:
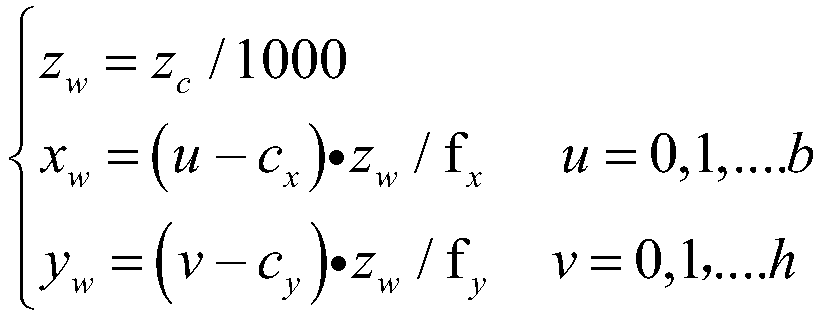
[0037] 1) Preprocessing: The internal parameters of the depth camera have been calibrated, and the RGB color image and depth image in front of the robot acquired by the depth camera are converted in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More