

Wheel-legged robot stress-type motion posture conversion method and system
A wheel-legged robot and motion posture technology, which is applied to motor vehicles, manipulators, transportation and packaging, etc., can solve the problems of slow motion posture conversion, large differences in dynamic models, and easy instability, so as to achieve enhanced flexibility and Adaptability, Effects of Simplified Dynamics Modeling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
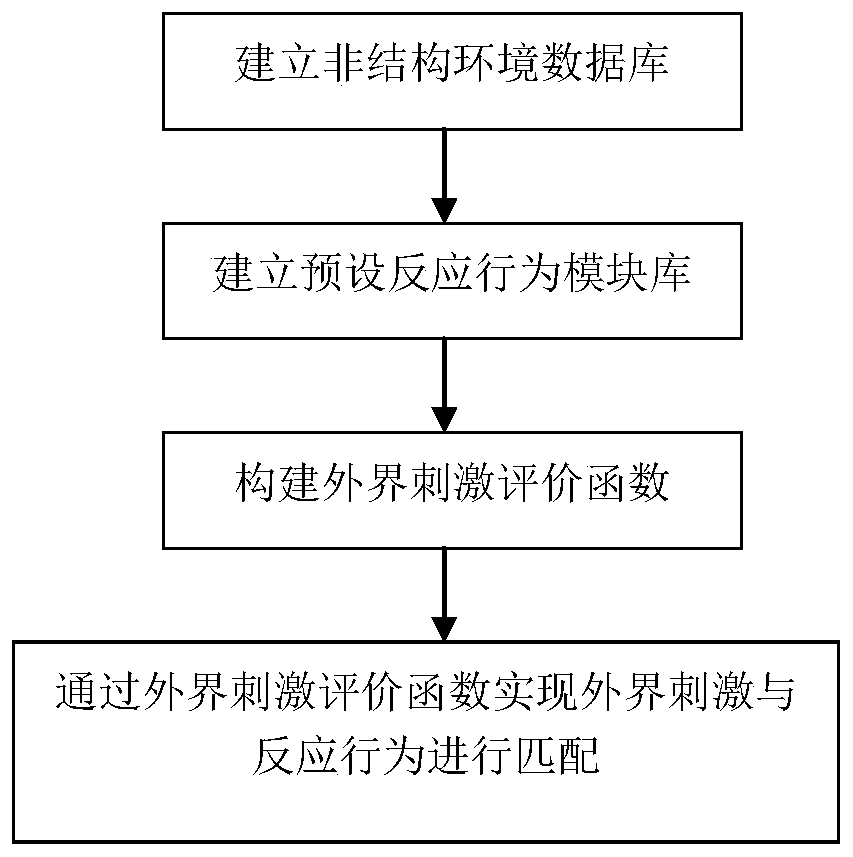
[0021] 1. Establish an unstructured environmental database, which stores all possible environmental conditions that the robot may encounter when working, that is, all possible stimuli that the robot may receive. The environmental conditions are specifically divided into natural environment change data and man-made environmental change data. The data specifically includes: natural phenomena such as wind, rain, and snow, and the movement of related objects; the data of man-made environmental changes specifically includes: people in motion, animals, and tools operated by humans;
[0022] 2. According to the unstructured environment database data, input the shape, degree of freedom and other characteristics of the wheel-legged robot into the computer for modeling to form a rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More