

Underactuated robot finger device based on rope winding
A robot finger, underactuated technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., to avoid twisting and breakage and achieve the effect of transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
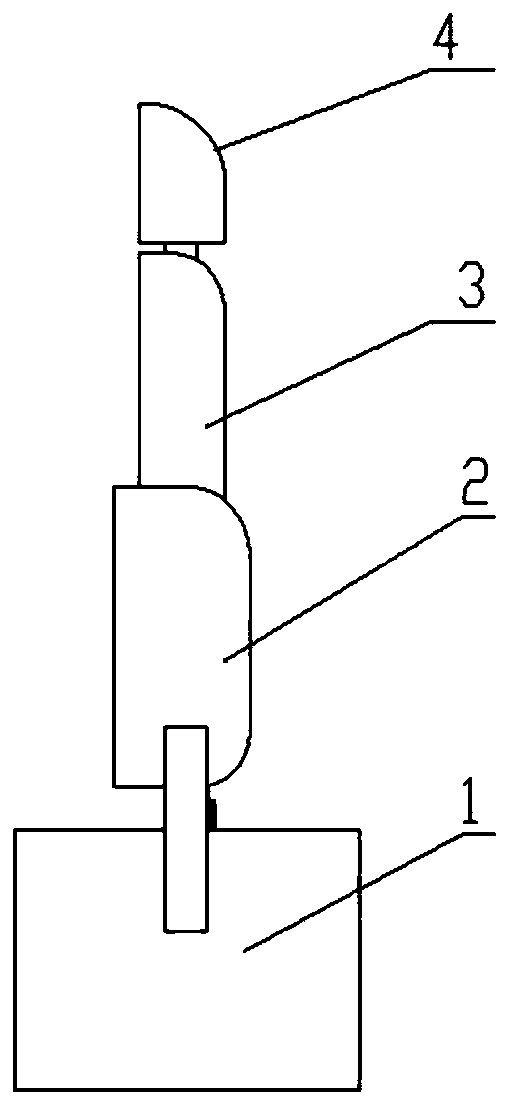
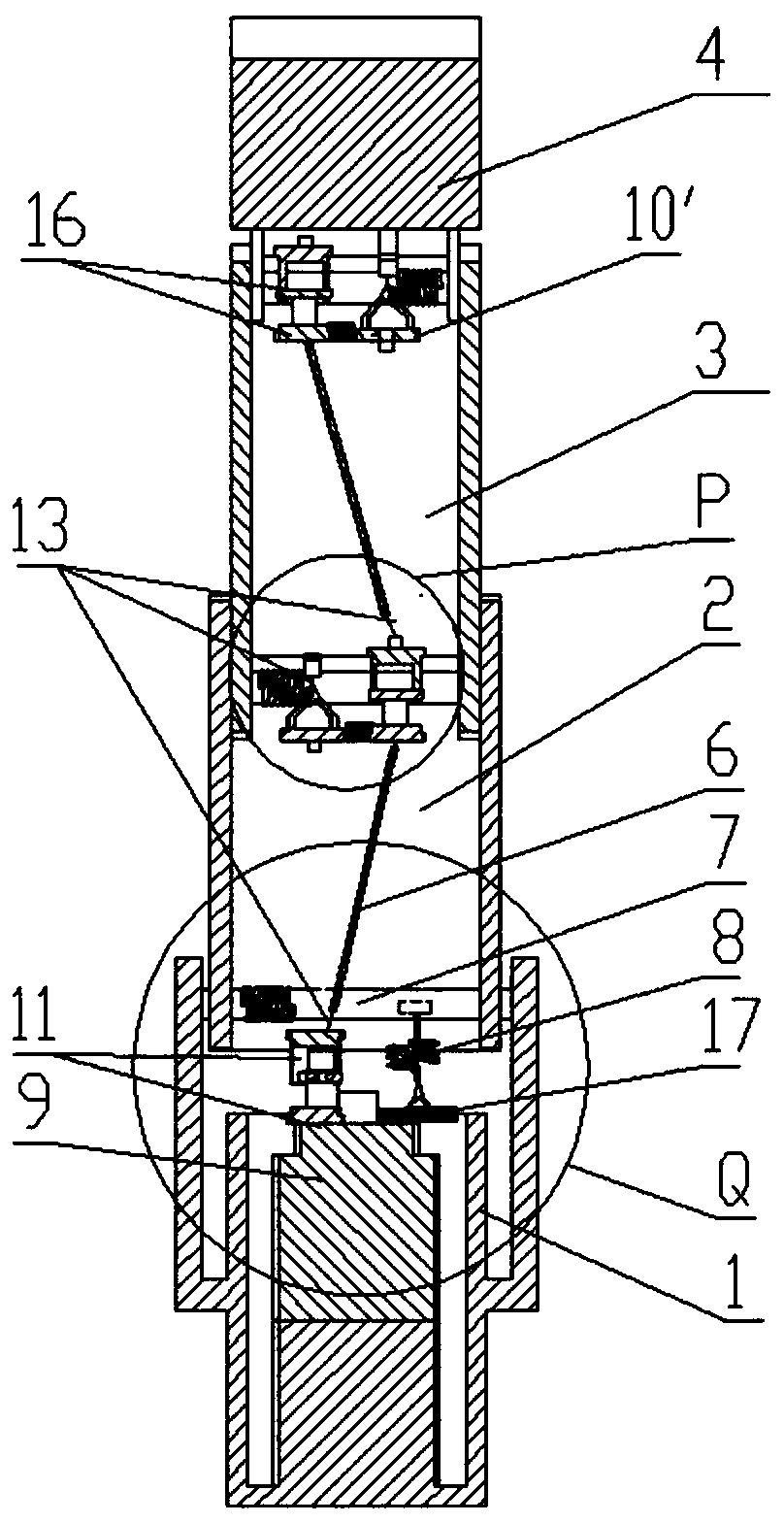
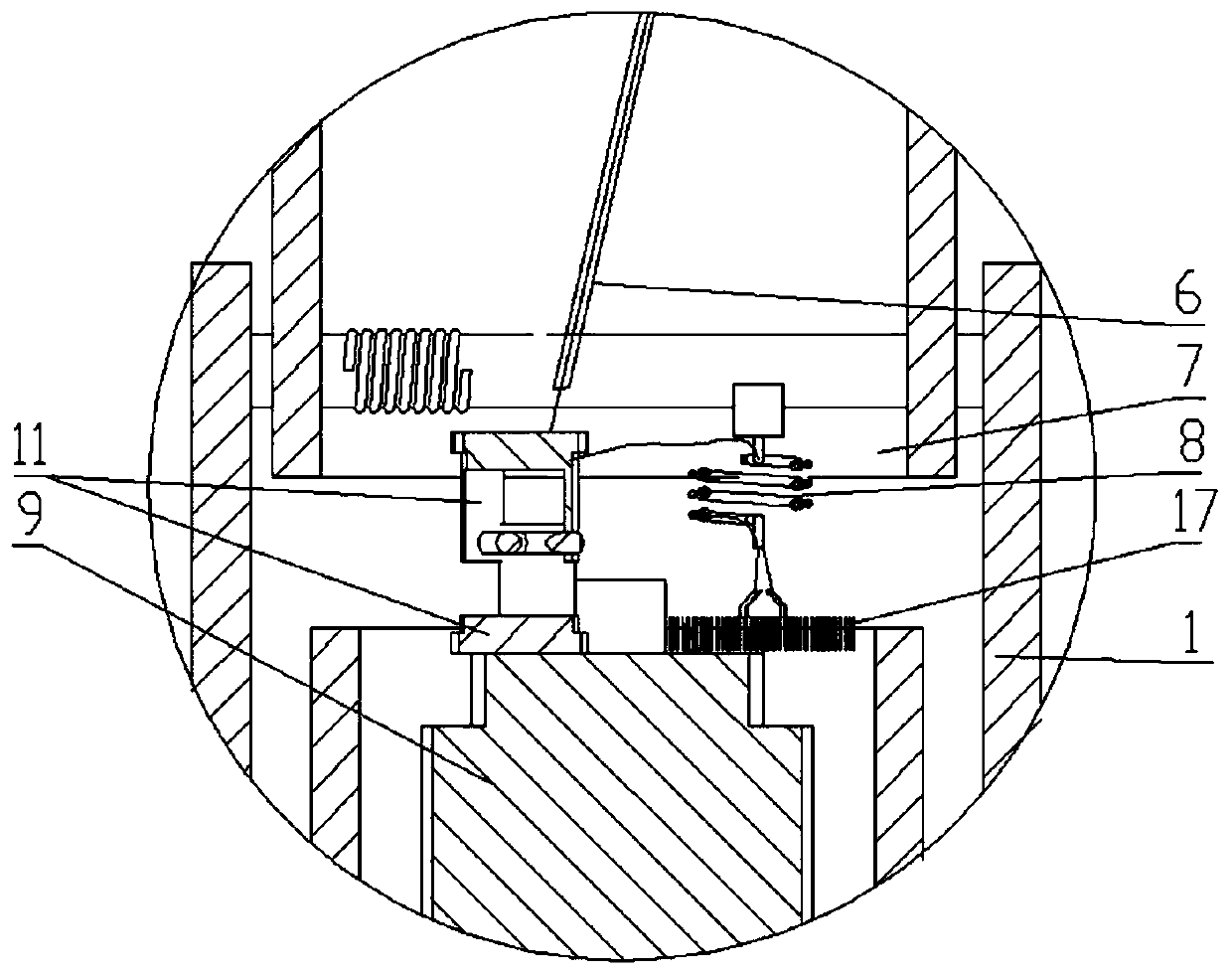
[0018] The underactuated robot finger device based on rope winding of the present invention will be further described below in conjunction with the drawings and specific embodiments: As shown in the figure, this embodiment includes a base shell 1, a first finger middle shell 2, a second finger middle The shell 3 and the end-of-finger shell 4, among which the base shell 1, the first middle-finger shell 2, the second middle-finger shell 3, and the end-of-finger shell 4 are hinged in sequence, and assembled according to the shape and movement principle of human fingers , where the hinges are equipped with release springs 5, which is the key for the robot fingers to bounce back in time and realize grabbing again. The range of motion at the hinges is less than 180 degrees, and the direction of motion is all in the same direction, reaching the same level as that of humans. High simulation of fingers. One end of the present invention is fixed on the flexible swinging mechanical arm. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More