Seven-degree-of-freedom upper limb exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in passive exercise equipment, physical therapy and other directions, can solve problems such as poor applicability, reduce harmful friction, increase service life, and ensure stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
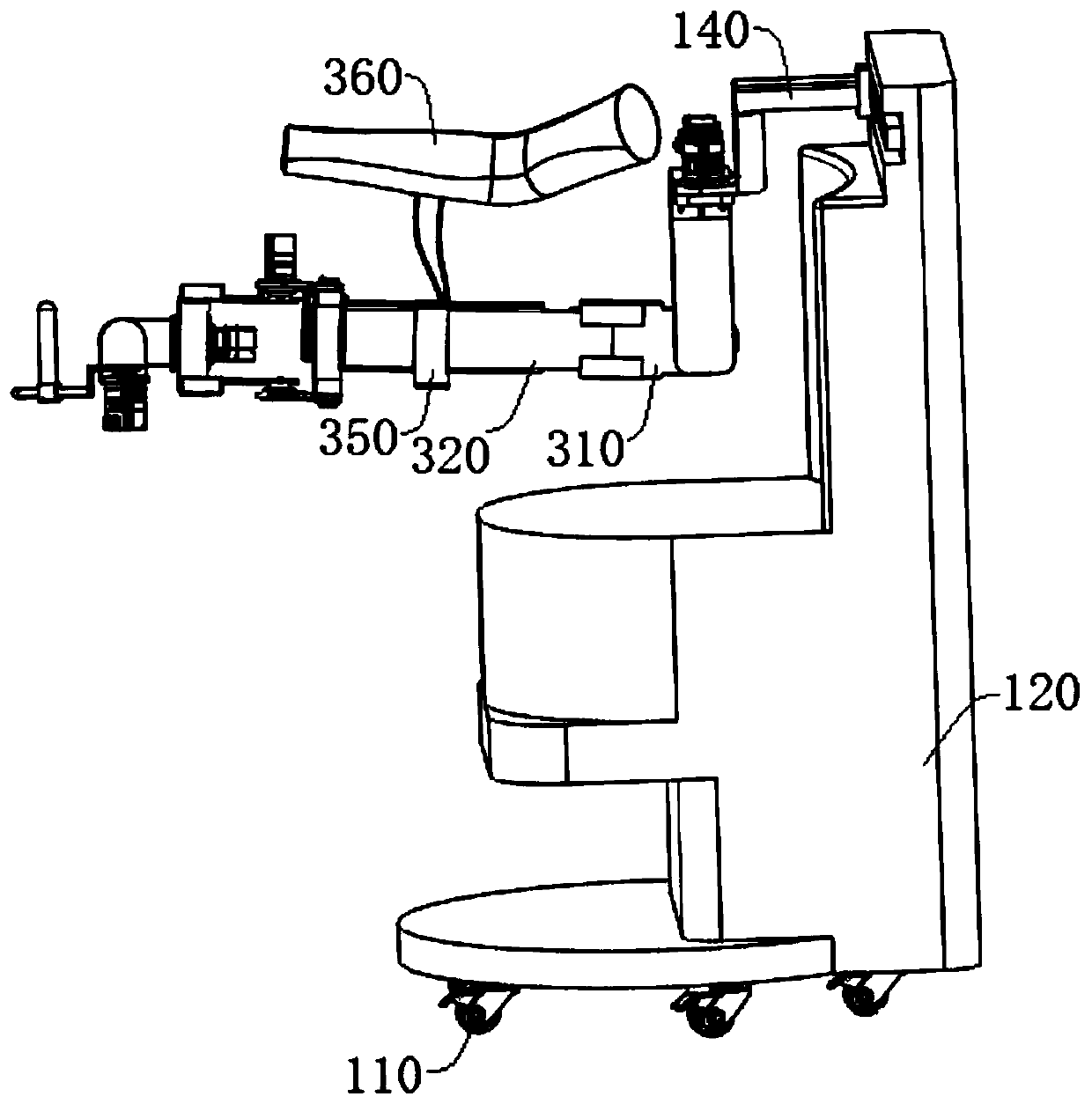
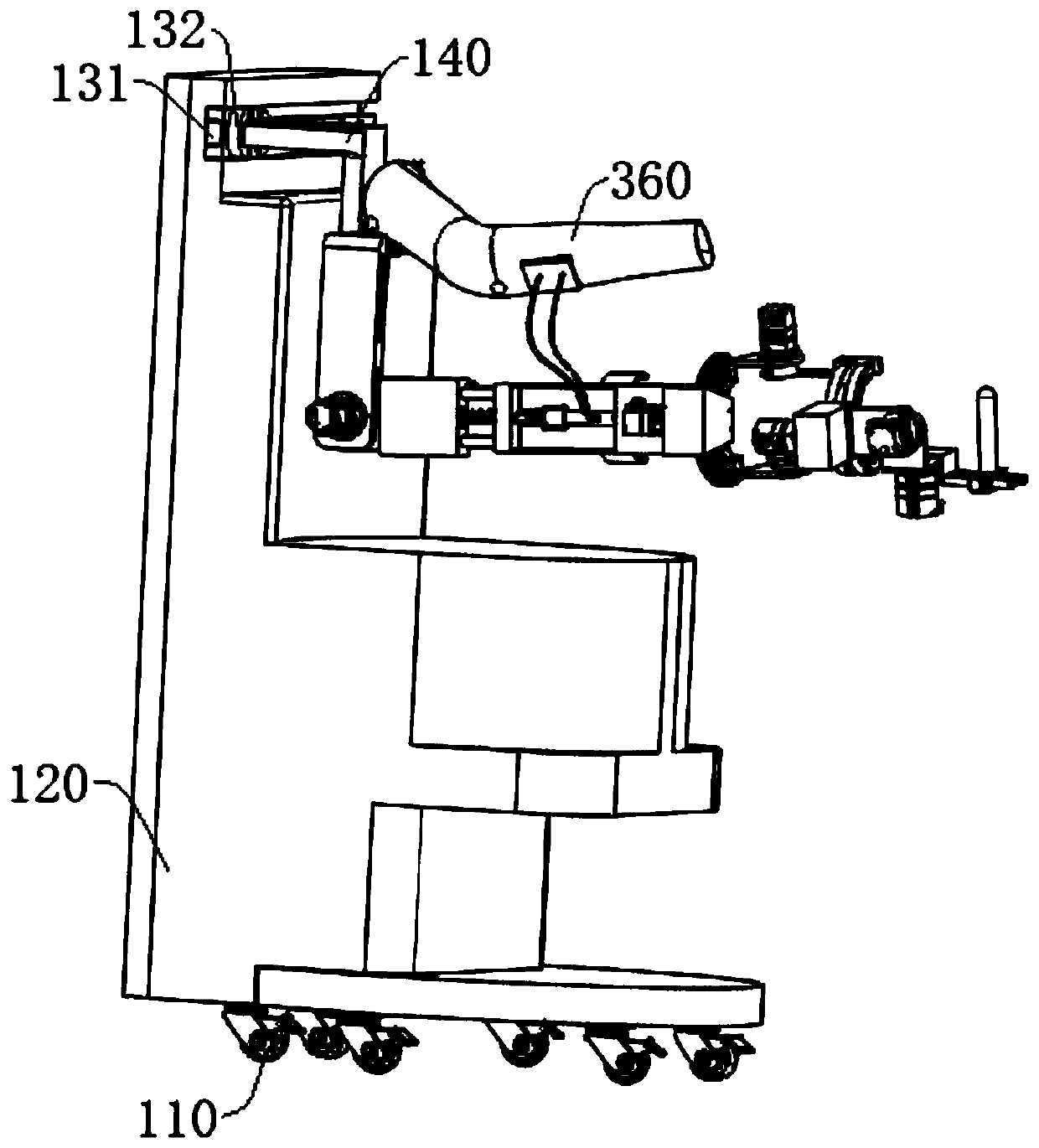
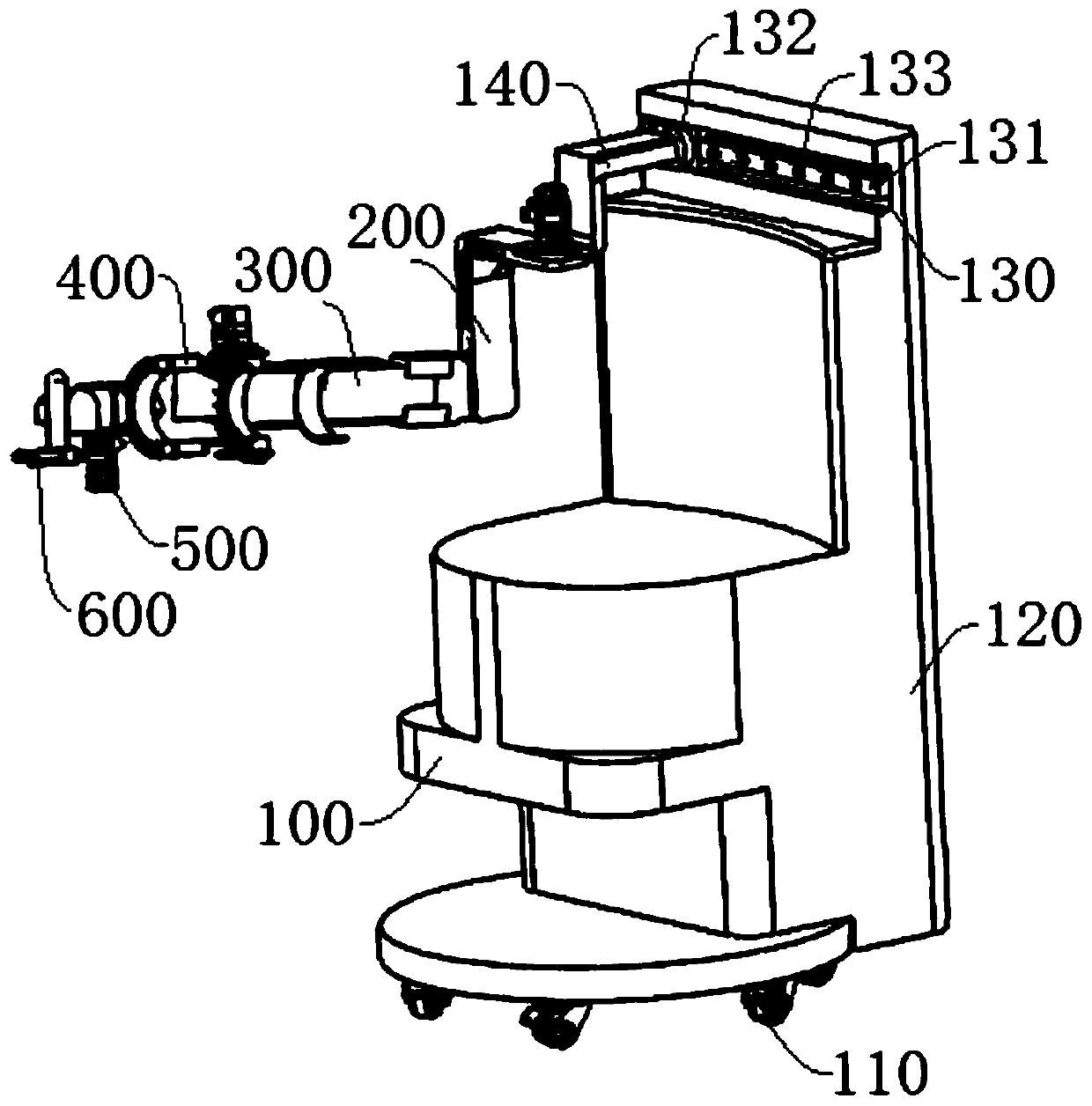
[0045] Such as Figure 1-7 As shown, a seven-degree-of-freedom upper limb exoskeleton rehabilitation robot in this embodiment includes a support mechanism 100, a shoulder joint training mechanism 200, an upper arm adjustment mechanism 300, an elbow joint training mechanism 400, a wrist joint training mechanism 500, and a wrist joint adjustment mechanism 600, the support mechanism 100, the shoulder joint training mechanism 200, the upper arm adjustment mechanism 300, the elbow joint training mechanism 400, the wrist joint training mechanism 500 and the wrist joint adjustment mechanism 600 are connected in sequence, through the coordination and collaborative work among multiple institutions , so that the user can realize the rehabilitation training of the shoulder joint, elbow joint and wrist joint. At the same time, it adapts to the individual situation of the user, improves the efficiency of use, and shortens the recovery cycle of the user.
[0046] The support mechanism 100 ...
Embodiment 2
[0061] This embodiment provides a usage method based on the structure of the seven-DOF upper limb exoskeleton rehabilitation robot in Embodiment 1.
[0062] Preliminary preparations: in the first step, the medical personnel help the user to sit on the base 120, and use the shoulder joint position adjustment assembly 130 so that the user's shoulder joint is located directly under the shoulder support plate 213; in the second step, the medical personnel will use the The affected limb of the patient is placed on the arm of the 7-DOF upper extremity exoskeleton rehabilitation robot. The user's hand grasps the handle 610. According to the length of the user's upper arm, the upper arm adjustment mechanism 300 is used to make the size of the upper arm of the rehabilitation robot consistent with the length of the user's upper arm. , to improve the comfort of the patient’s upper arm during training; in the third step, according to the position of the user’s wrist joint, the wrist joint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com