

Manipulator wrist positioning system and positioning method thereof
A positioning system and manipulator technology, applied in the field of manipulators, can solve the problems of lower positioning accuracy, difficult positioning work, poor wrist stability, etc., and achieve good positioning effect, easy control and use, and accurate accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
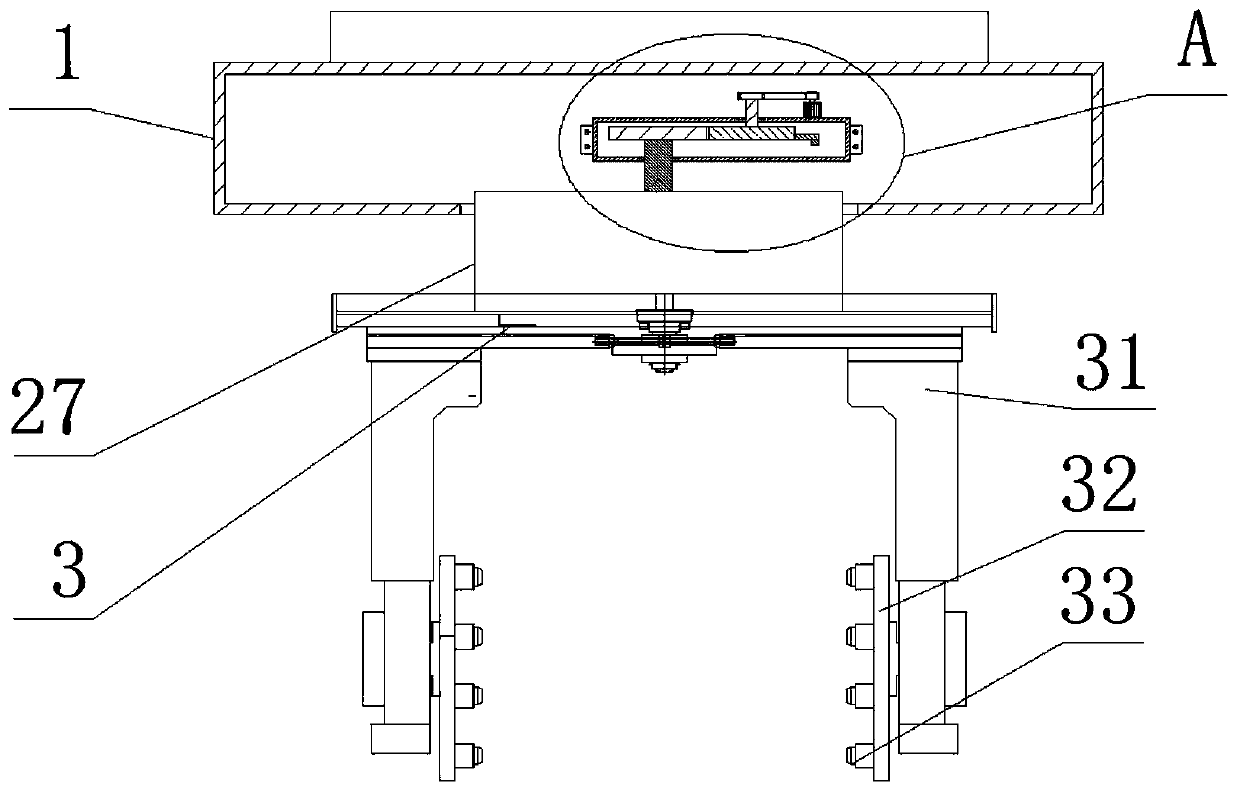
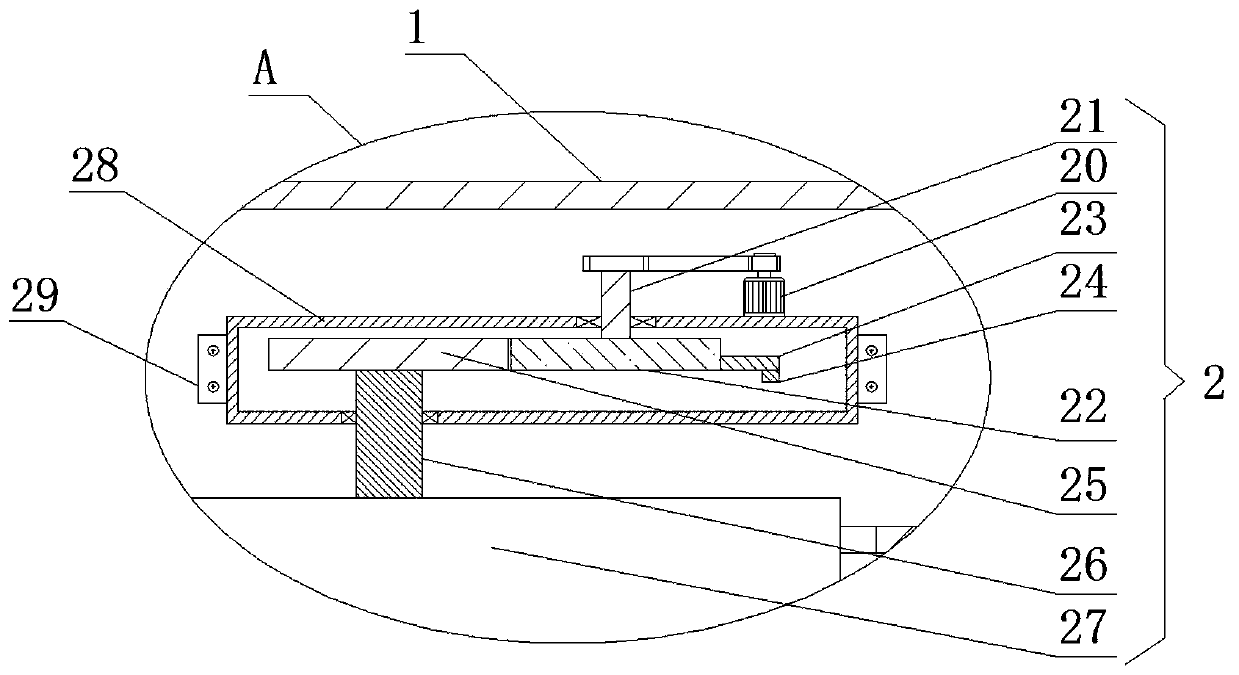
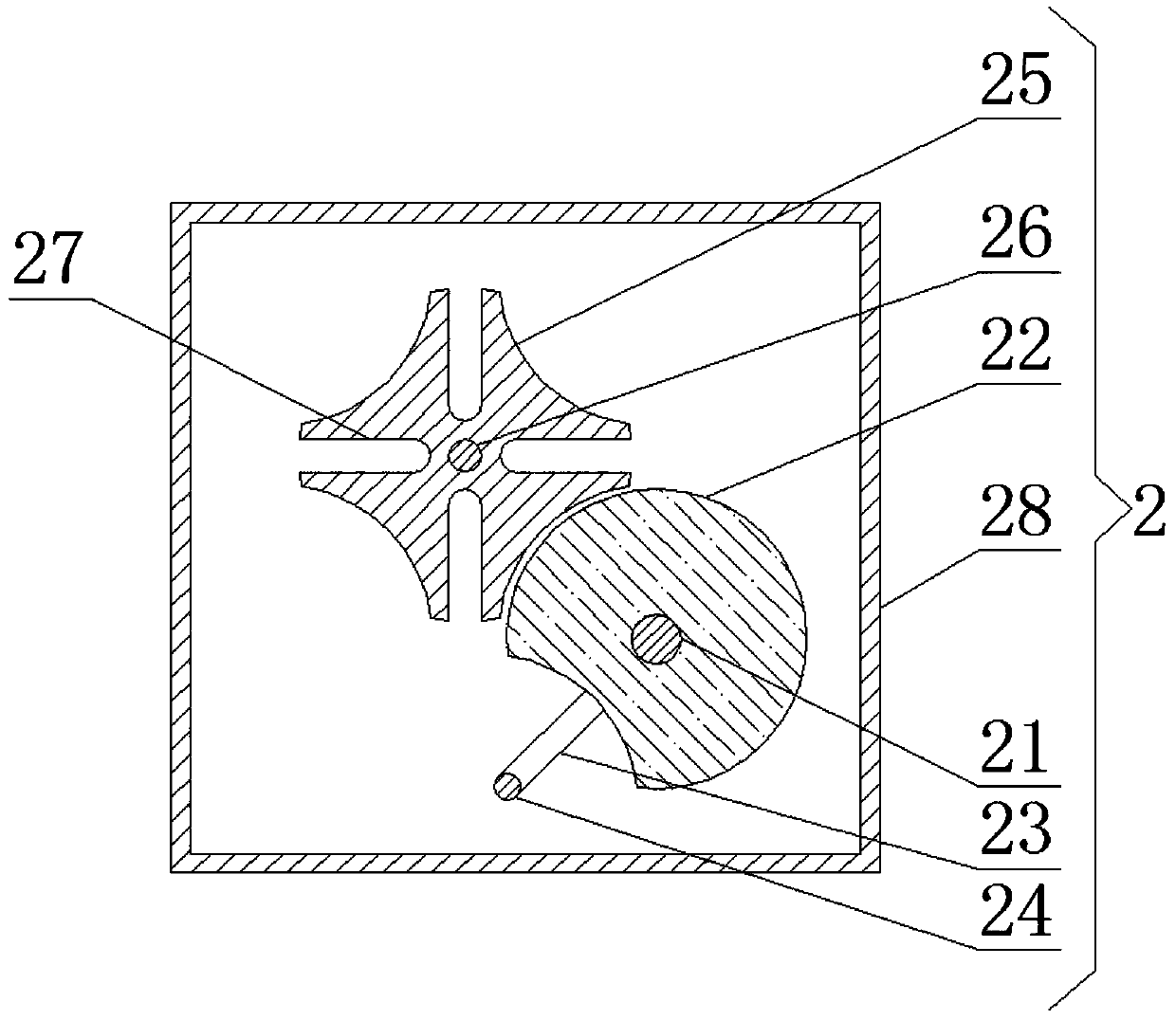
[0022] Example 1, such as Figure 1-3 Shown:
[0023] A manipulator wrist positioning system, comprising a shell 1, a positioning structure 2 and a manipulator steering platform 3, two mechanical arm rods 31 are symmetrically installed on the bottom outer wall of the manipulator steering table 3, and a rotating card is installed on the inner wall of each mechanical arm rod 31 Disc 32, the inwall of each rotary chuck 32 is all equipped with vacuum suction cup 33, and vacuum suction cup 33 is installed in equal parts sequentially from top to bottom on the inwall of rotary chuck 32, by the installation of vacuum suction cup 33, can improve the manipulator. Grabbing effect, uniform force and stable clamping, the rotary chuck 32 is driven by the cylinder, and the rotary chuck 32 is flexibly connected with the mechanical arm rod 31, and the rotary chuck 32 is driven by the cylinder, which can realize the vertical rotation of the rotary chuck 32 Rotating in a straight direction impr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More