Adaptive laser radar point cloud correction and positioning method based on sweeping robot
A technology of sweeping robot and laser radar, which is applied in the directions of instruments, surveying and navigation, electromagnetic wave re-radiation, etc., can solve the problems of inaccurate calibration results, ignoring the overall motion of the robot, and inability to accurately calibrate, so as to speed up the convergence speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The accompanying drawings are for illustrative purposes only, and should not be construed as limiting the present invention; in order to better illustrate this embodiment, certain components in the accompanying drawings will be omitted, enlarged or reduced, and do not represent the size of the actual product; for those skilled in the art It is understandable that some well-known structures and descriptions thereof may be omitted in the drawings. The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
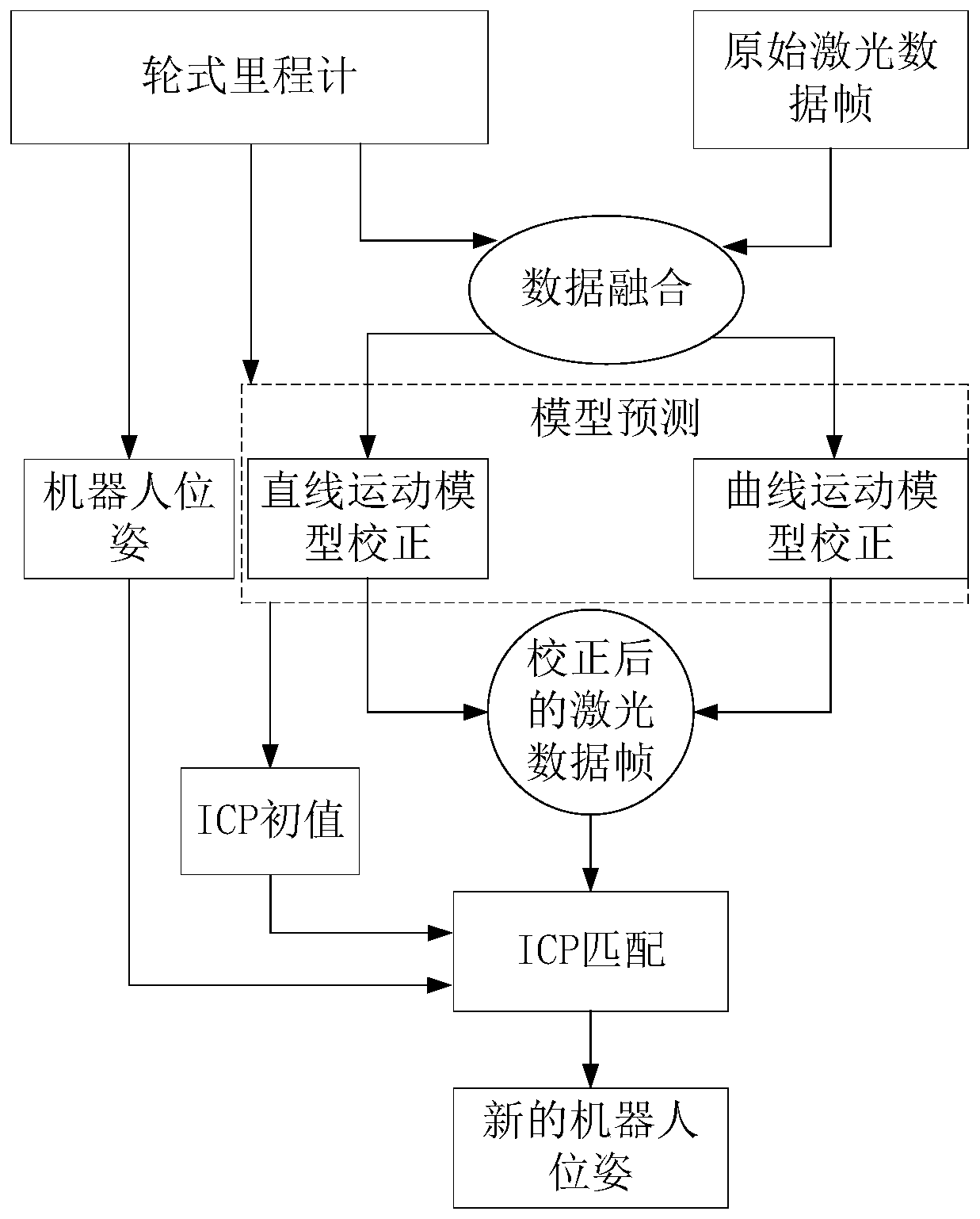
[0049] Such as figure 1 As shown, the adaptive lidar point cloud correction and positioning method based on the sweeping robot includes the following steps:
[0050] S1. When the sweeping robot is moving, it collects a new frame of data through the laser radar mounted on the robot. Assume that after the previous frame of data is released, the time stamp is t s , the pose of the sweepin...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap